
Yonglong Chen, Yingke Xie, Hengheng Liang, Xinghong Zhang, Cheng Liu. Investigation of Light Frequency-Hopping LiDAR and Its Anti-Interference Performance[J]. Laser & Optoelectronics Progress, 2022, 59(13): 1328003
- Laser & Optoelectronics Progress
- Vol. 59, Issue 13, 1328003 (2022)
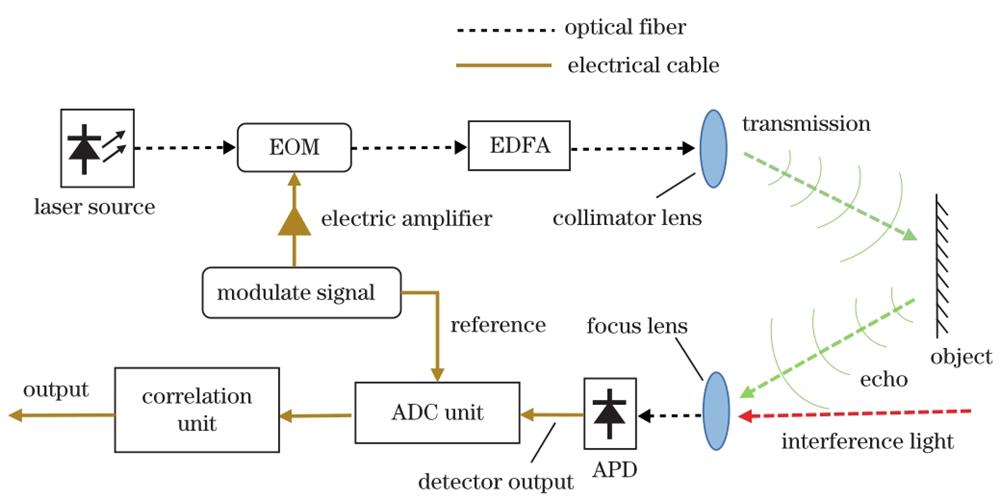
Fig. 1. Schematic diagram of the anti-interference experiment setup of the LFH LiDAR
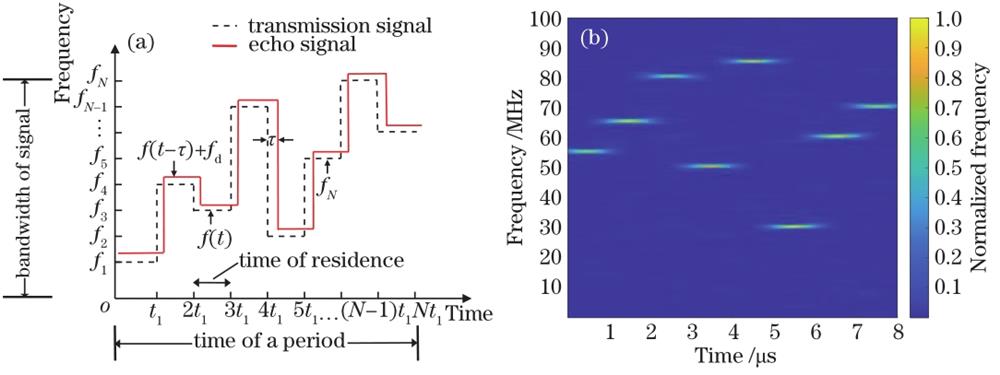
Fig. 2. Time-frequency diagram of modulation signal of the LFH LiDAR. (a) Principle of the LFH; (b) LFH LiDAR signal
Fig. 3. Ranging result of the LFH LiDAR
Fig. 4. Ranging results of LFH LiDAR with same type interference. (a) β=1,M=1; (b) β=1,M=3; (c) β=4, M=2
Fig. 5. Ranging results of LFH LiDAR with pulse LiDAR interference. (a) β=1,M=1; (b) β=1,M=3; (c) β=4,M=2
Fig. 6. Ranging results of LFH LiDAR with FMCW LiDAR interference. (a) β=1,M=1; (b) β=1,M=3; (c) β=4,M=2
Fig. 7. Ranging results of LFH LiDAR with CW LiDAR interference. (a) β=1, M=1; (b) β=1, M=3; (c) β=4, M=2
Fig. 8. Experiment of interference. (a) 16-lines commercial pulse LiDAR; (b) low noise and tunable FMCW LiDAR; (c) experiment setup
|
Table 1. Simulation specifications of the LFH LiDAR
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Measuring results of six different distance with different interference sources and the relative error of distance measuring

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20