
He Chen, Qingyue Xu, Pan Guo, Siying Chen, Wei Hao, Rui Hu, Xin Li. Dual Field-of-View Scheimpflug Lidar with Small Dead Zone[J]. Acta Optica Sinica, 2023, 43(24): 2428008
- Acta Optica Sinica
- Vol. 43, Issue 24, 2428008 (2023)
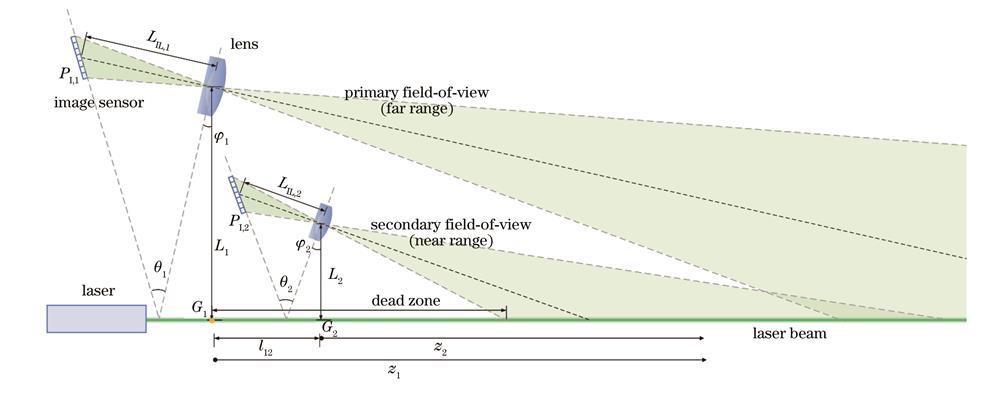
Fig. 1. Principle of the dual-FOV Scheimpflug lidar

Fig. 2. Measurement distance and range resolution of the lidar system. (a) Pixel-distance relationship; (b) distance-resolution relationship
Fig. 3. System configuration and measurement arrangement. (a) Photograph of the dual-FOV Scheimpflug lidar; (b) schematic of the aerosol detection experiment
Fig. 4. Images of laser beam and backscattering intensity profiles. (a) Image of secondary FOV; (b) image of primary FOV; (c) distance-intensity profile of secondary FOV; (d) distance-intensity profile of primary FOV
Fig. 5. Intensity profile of the signal before and after splicing. (a) Separate signals of primary FOV and secondary FOV; (b) combined signal of dual-FOV
Fig. 6. Time-space map of aerosol backscattering signal measured by the dual-FOV Scheimpflug lidar
Fig. 7. Intensity profiles and inversion results of aerosol extinction coefficient at typical time. (a) Intensity profiles; (b) aerosol extinction coefficient profiles
Fig. 8. Temporal-spatial variation of released aerosols. (a) Transmittance; (b) time-space map of aerosol extinction coefficient
Fig. 9. Scatter plot and linear fitting of signal intensity and extinction coefficient at a distance of 0.36 m
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. System specification of the dual-FOV Scheimpflug lidar

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20