
Mingjun Wang, Fang Yi, Le Li, Chaojun Huang. Local neighborhood feature point extraction and matching for point cloud alignment[J]. Infrared and Laser Engineering, 2022, 51(5): 20210342
- Infrared and Laser Engineering
- Vol. 51, Issue 5, 20210342 (2022)
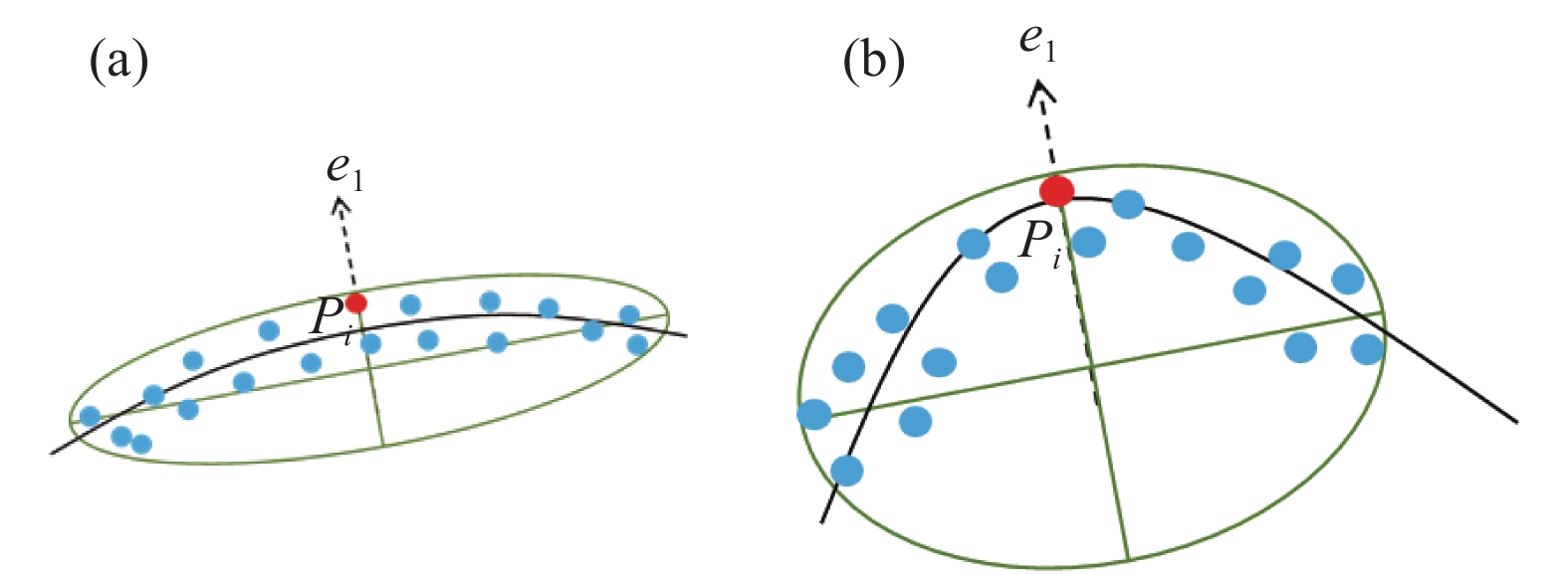
Fig. 1. Changes in the surface of a local neighborhoods. (a) Relatively flat surface; (b) Undulating surface

Fig. 2. Feature point extraction of Dragon model under different artificially selected thresholds
Dragon模型在人为选取不同阈值
下的特征点提取情况
Fig. 3. Feature point extraction for Dragon 0°. (a) ISS; (b) SIFT; (c) Harris3D; (d) Proposed method
Fig. 4. Feature point extraction for Bunny 0°. (a) ISS; (b) SIFT; (c) Harris3D; (d) Proposed method
Fig. 5. Influence of neighborhood radius r on feature point extraction. (a) Relationship between registration error and feature point extraction radius r ; (b) Relationship between registration time and feature point extraction radius r 邻域半径
对特征点提取的影响。(a)配准误差与特征点提取半径
的关系;(b)配准时间与特征点提取半径
的关系
Fig. 6. Rough matching results of Dragon in different feature point extraction methods. (a) ISS; (b) SIFT; (c) Harris3D; (d) Proposed method
Fig. 7. Rough matching results of Bunny in different feature point extraction methods. (a) ISS; (b) SIFT; (c) Harris3D; (d) Proposed method
Fig. 8. Results of fine registration for Dragon and Bunny. (a) ICP algorithm; (b) Proposed ICP algorithm
Fig. 9. Rough matching results of Bunny with 10% noise under different methods. (a) ISS; (b) SIFT; (c) Harris3D; (d) Proposed method
Fig. 10. Rough matching results of Bunny with 20% noise under different methods. (a) ISS; (b) SIFT; (c) Harris3D; (d) Proposed method
Fig. 11. Results of fine registration for Bunny with 10% and 20% noise. (a) ICP algorithm; (b) Proposed ICP algorithm
Fig. 12. Rough matching results of Room in different feature point extraction methods. (a) ISS; (b) SIFT; (c) Harris3D; (d) Proposed method
Fig. 13. Rough matching results of Land in different feature point extraction methods. (a) ISS; (b) SIFT; (c) Harris3D; (d) Proposed method
Fig. 14. Results of fine registration for Room and Land. (a) ICP algorithm; (b) Proposed ICP algorithm
|
Table 1. Point cloud registration parameter settings
| |||||||||||||||||||||||||||||||||||
Table 2. Alignment efficiency comparison of Dragon and Bunny for coarse matching in different methods
|
Table 3. Comparison of alignment efficiency for Dragon and Bunny fine alignment
| |||||||||||||||||||||||||||||||||||
Table 4. Alignment efficiency comparison of Bunny with 10% and 20% noise for coarse matching in different methods
|
Table 5. Alignment efficiency comparison of Bunny with 10% and 20% noise fine alignment
| |||||||||||||||||||||||||||||||||||
Table 6. Alignment efficiency comparison of Room and Land for coarse matching in different methods
|
Table 7. Alignment efficiency comparison of Room and Land fine alignment

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20