
Xiaohong Ma. Updating Method of Improved Gradient Threshold in Object Tracking[J]. Laser & Optoelectronics Progress, 2018, 55(6): 061502
- Laser & Optoelectronics Progress
- Vol. 55, Issue 6, 061502 (2018)
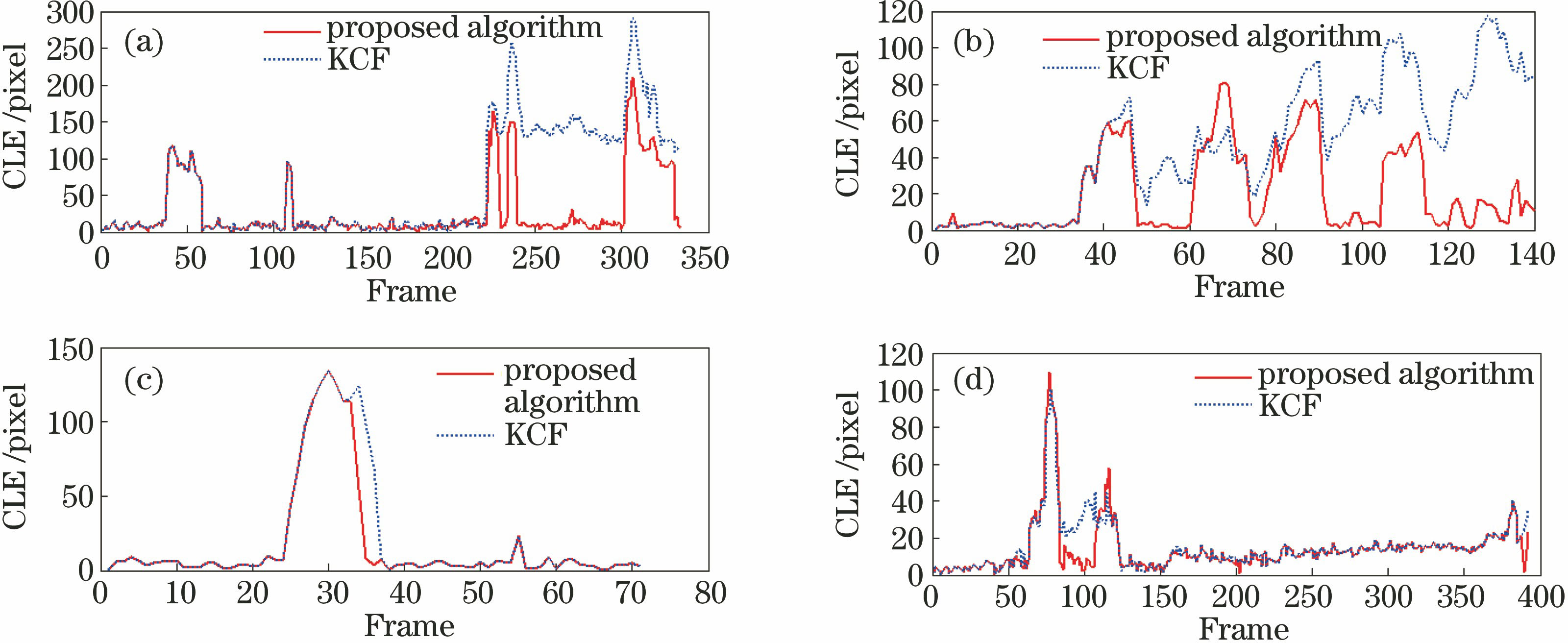
Fig. 1. Comparison of CLE between KCF and the proposed algorithms based on four videos. (a) BlurBody; (b) couple; (c) deer; (d) soccer
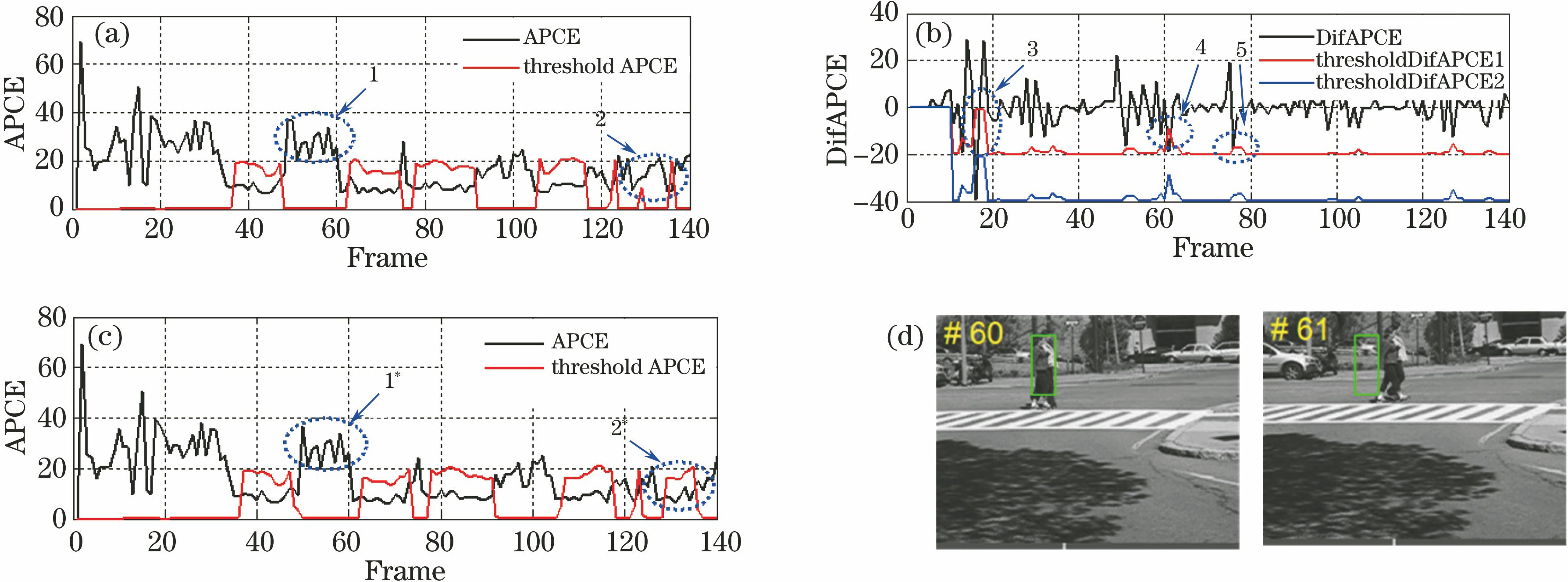
Fig. 2. Comparison of APCE and its threshold, and APCE gradient and its threshold (take the couple video as an example). (a) APCE curve of the proposed algorithm; (b) DifAPCE curve of the proposed algorithm; (c) APCE curve of the proposed algorithm (without the judgment of gradient threshold); (d) two frame changes corresponding to the label ring 4 in Fig. 2(b)
Fig. 3. Comparison of tracking performance with and without gradient threshold judgment. (a) Without gradient threshold; (b) with gradient threshold
Fig. 4. Qualitative tracking comparison of KCF (top) and proposed algorithms (bottom). (a) BlurBody; (b) couple; (c) soccer; (d) deer
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Comparison of accuracy and speed between KCF and the proposed algorithm (threshold value is 20 pixel)
|
Table 2. Comparison of tracking precision with and without gradient threshold judgment

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20