
Fenggang Liu, Lei Ding, Li Xiao. Remote control robot system based on predictive algorithm[J]. Infrared and Laser Engineering, 2021, 50(S2): 20210109
- Infrared and Laser Engineering
- Vol. 50, Issue S2, 20210109 (2021)
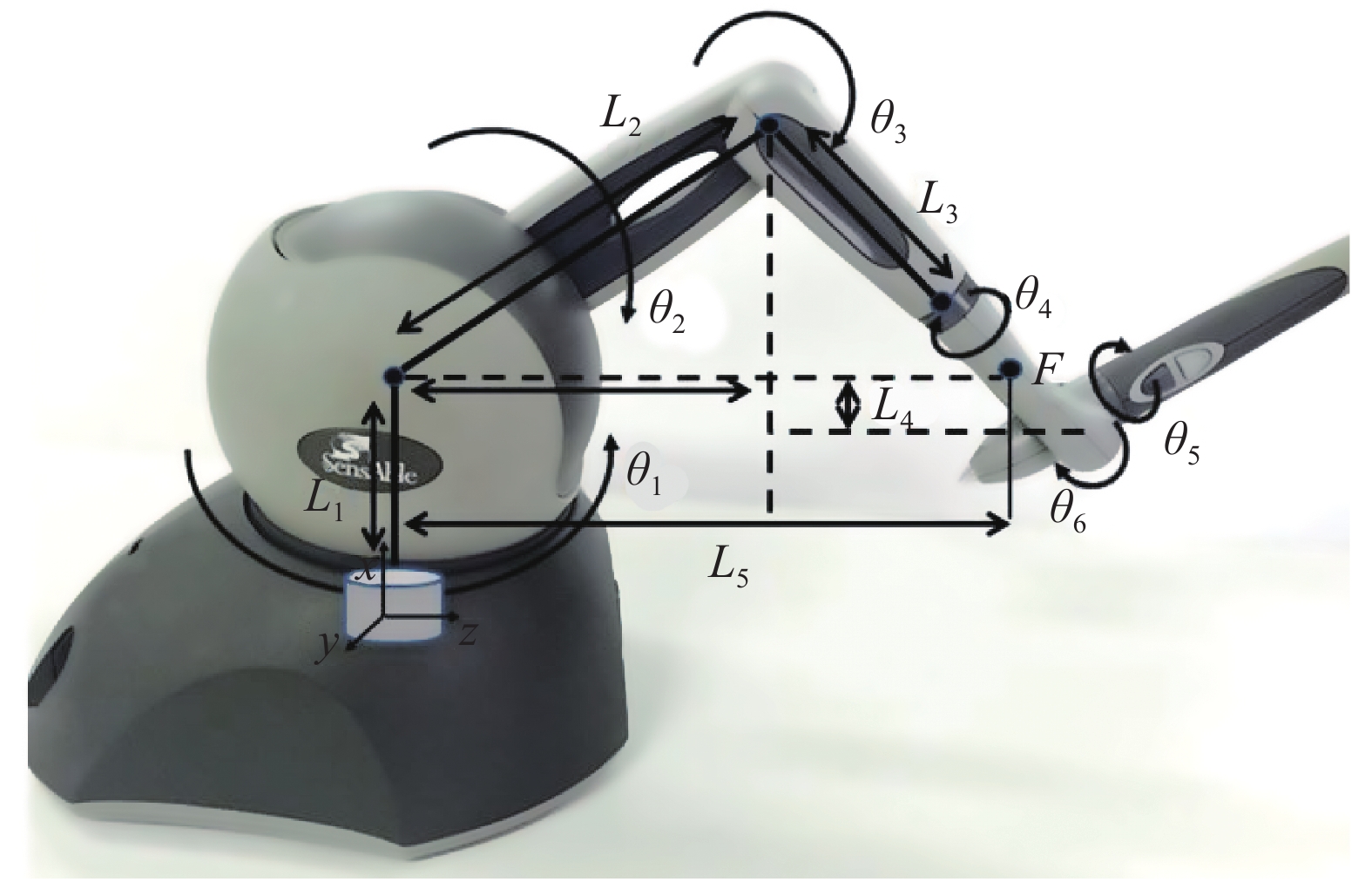
Fig. 1. PHANTOM Omnistructure parameter diagram
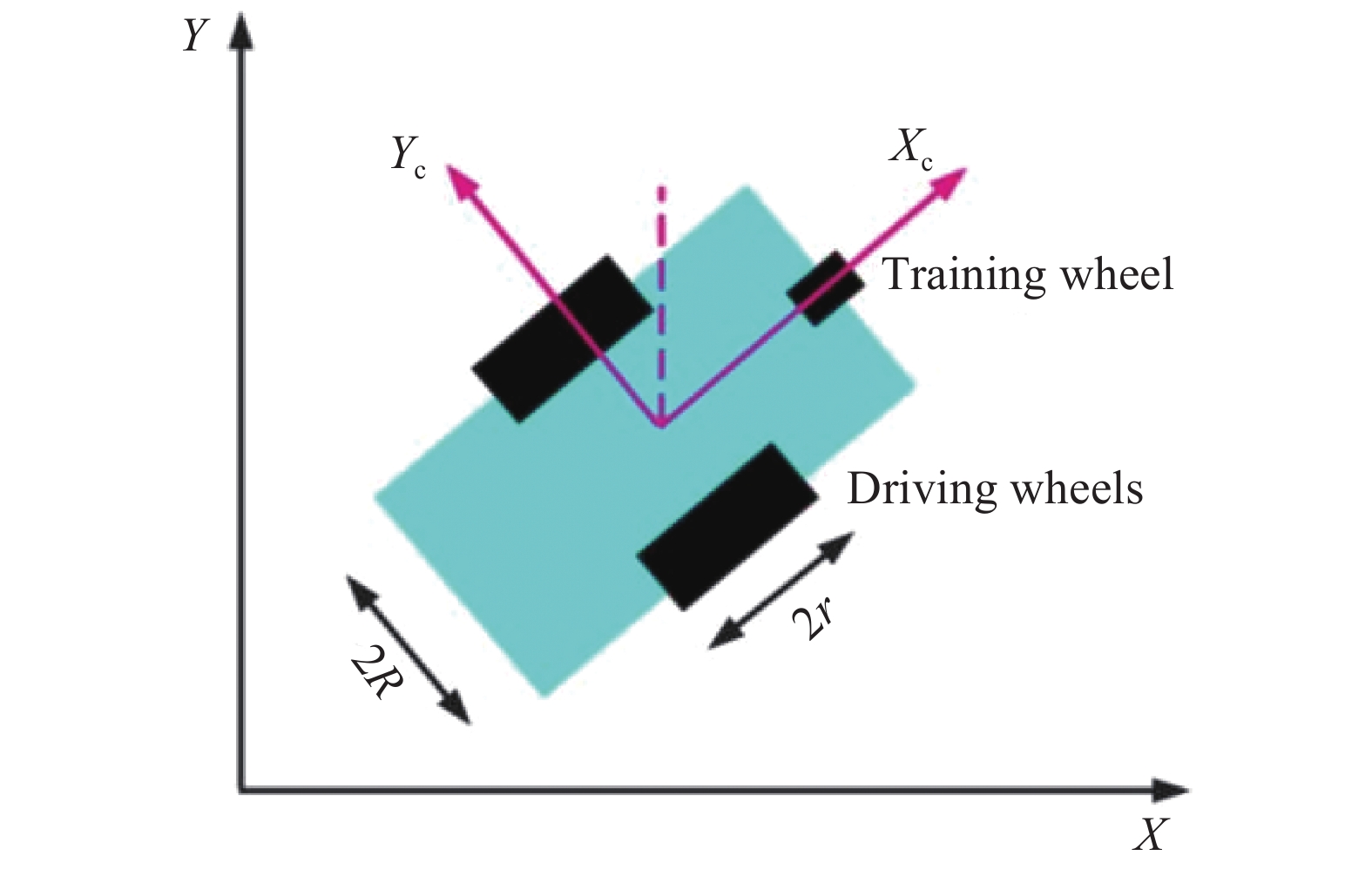
Fig. 2. Kinematic modeling of the mobile robot
Fig. 3. Basic model of Smith predictor
Fig. 4. Time delay separating system of Smith predictor
Fig. 5. Block diagram of system
Fig. 6. 0.01 s delayed case
Fig. 7. 0.02 s delayed case
Fig. 8. 0.1 s delayed case
Fig. 9. System block diagram of entire system
Fig. 10. GM (1,1) model predictive value
Fig. 11. Force feedback conversion diagram
Fig. 12. Mobile robot
Fig. 13. Experiment environment of mobile robot
Fig. 14. Path trajectory of mobile robot in non-visible environment (curve)
Fig. 15. Distance between obstacle and mobile robot
Fig. 16. Experimental environment of mobile robot(rectangular path)
Fig. 17. Path trajectory of mobile robot in non-visual environment (rectangular)
Fig. 18. Distance between mobile robot and obstacle (rectangular)
|
Table 1. D-H parameter table of the PHANTOM Omni structure
|
Table 2. Parameters table of the mobile robot


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20