
Pengfei Shang, Yi Chen, Weijia Lv, Fang Zheng, Jielong Wang. Point-Cloud Semantic Segmentation Network Considering Normals[J]. Laser & Optoelectronics Progress, 2022, 59(16): 1610011
- Laser & Optoelectronics Progress
- Vol. 59, Issue 16, 1610011 (2022)
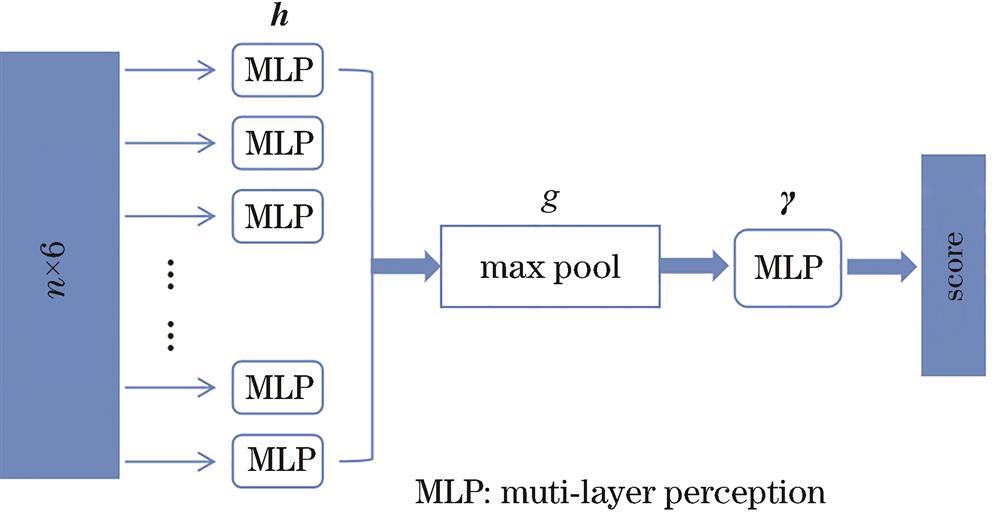
Fig. 1. Framework of PointNet (vanilla)
![Framework of PPCAN (modified from Ref. [7])](/richHtml/lop/2022/59/16/1610011/img_02.jpg)
Fig. 2. Framework of PPCAN (modified from Ref. [7])
Fig. 3. Comparison of accuracy in training epoch
Fig. 4. Semantic segmentation results of column. (a) PointNet; (b) PPCAN; (c) ground truth
Fig. 5. Semantic segmentation results of sofa. (a) PointNet; (b) PPCAN; (c) ground truth
Fig. 6. Increment of IoU and accuracy of PPACAN compared with PointNet
Fig. 7. Semantic segmentation results of board. (a) PointNet; (b) PPCAN; (c) ground truth
Fig. 8. Results of 8 times predication on both PointNet and PPCAN. (a) PointNet; (b) PPCAN
Fig. 9. Error characteristics of IoU with PPCAN. (a) Range; (b) standard deviation
|
Table 1. Results of semantic segmentation on S3DIS
|
Table 2. Comparison of accuracy among 13 classes
|
Table 3. Comparison of IoU among 13 classes

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20