
Guiyang Zhang, Ju Huo, Ming Yang, Xing Zhou, Liang Wei, Muyao Xue. Binocular camera calibration based on dual update strategy weighted differential evolution particle swarm optimization[J]. Infrared and Laser Engineering, 2021, 50(4): 20200280
- Infrared and Laser Engineering
- Vol. 50, Issue 4, 20200280 (2021)
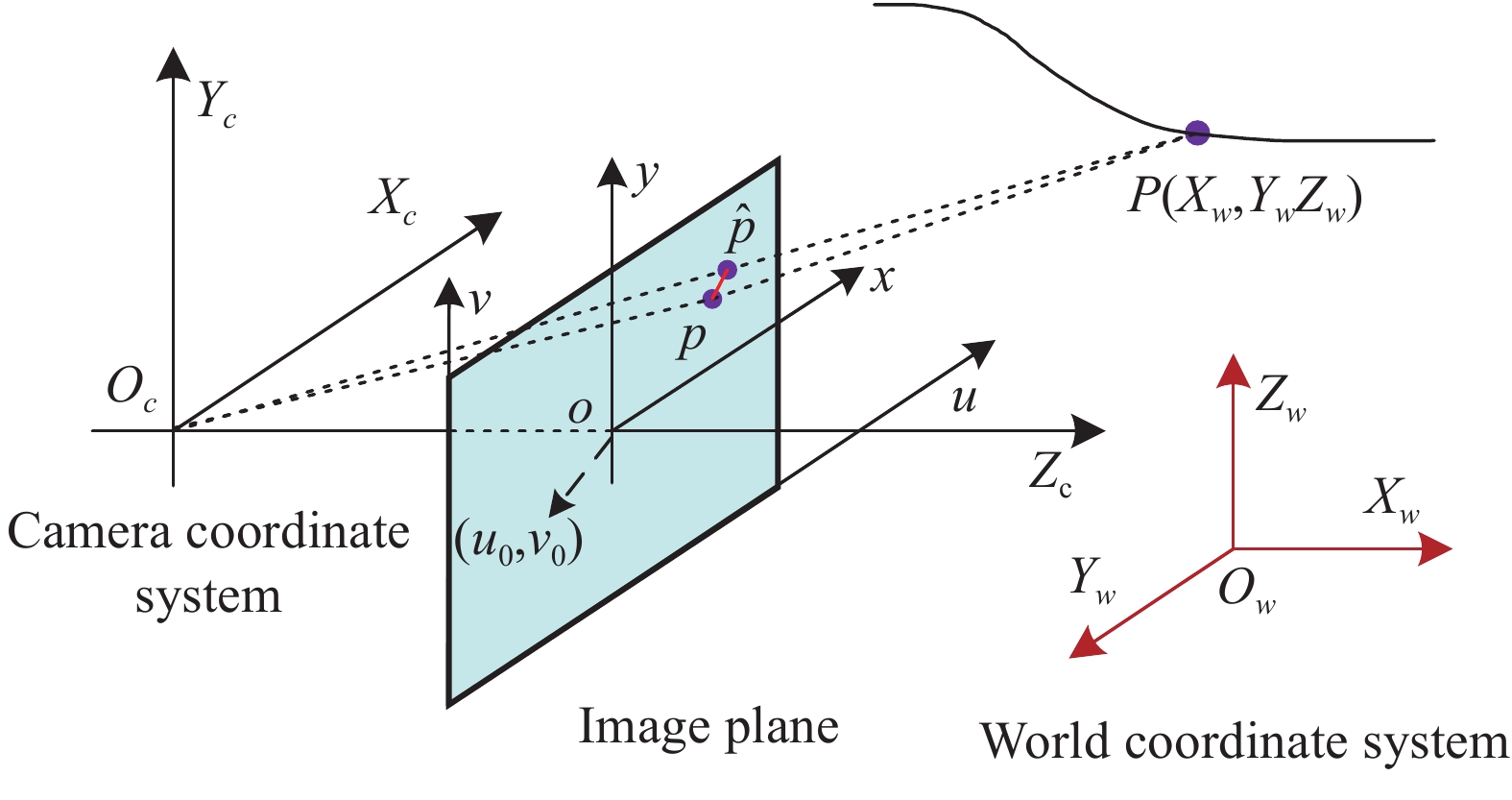
Fig. 1. Pinhole imaging model of camera
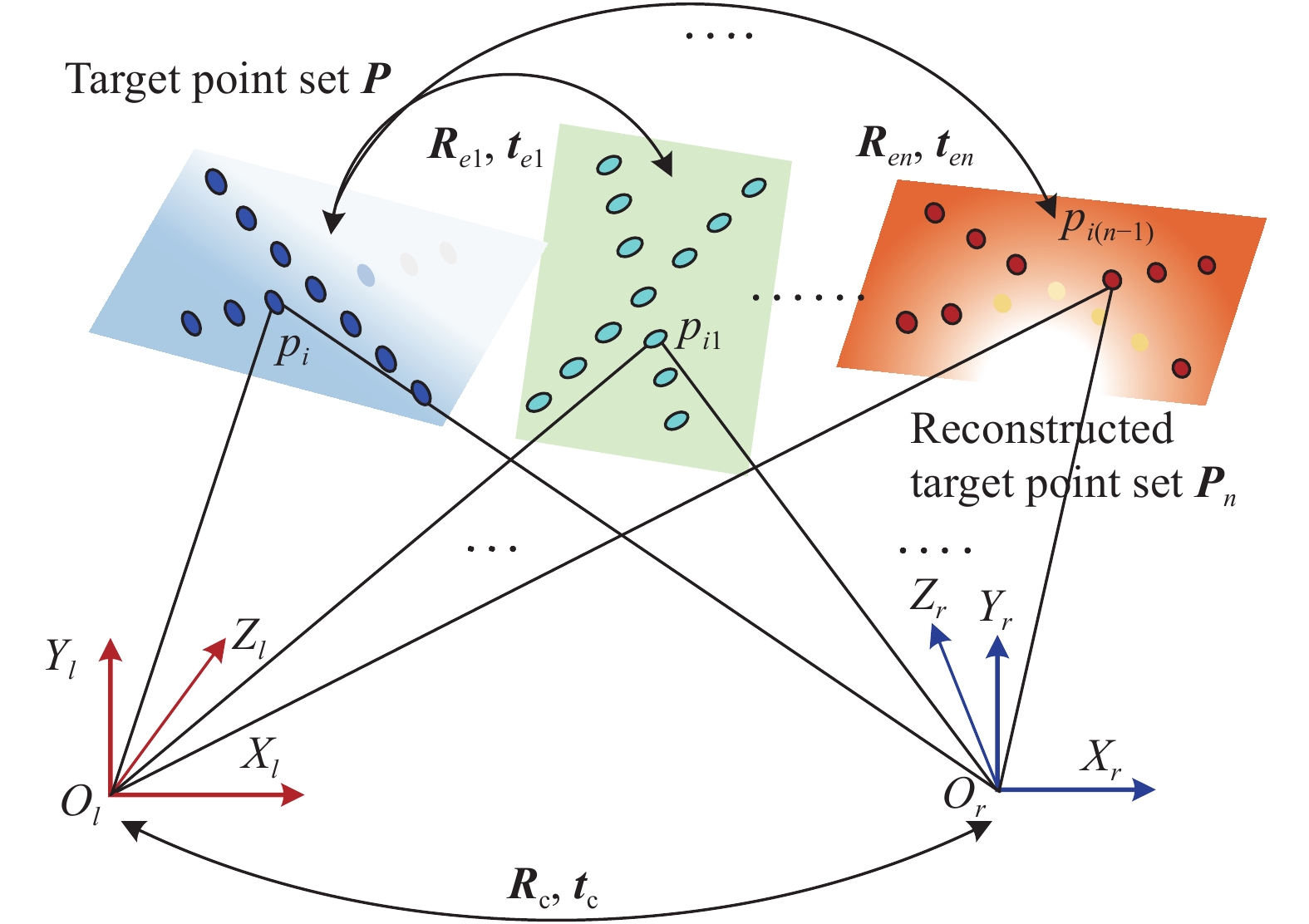
Fig. 2. Camera calibration model for space target measurement
Fig. 3. Flow chart of camera parameter calibration based on WDEPSO algorithm
Fig. 4. Spatial distribution of synthetic data points
Fig. 5. Reconstruction error of spatial points. (a) By traditional method; (b) By the proposed method
Fig. 6. Distribution of reprojection error. (a) In
direction; (b) In
direction
重投影误差分布。(a)
方向;(b)
方向
Fig. 7. Planar calibration plate. (a) Spatial size; (b) Extraction and coding of circular mark points
Fig. 8. Calibration board posture distribution and image acquisition
Fig. 9. Staff gagues
Fig. 10. Structure of vision measurement system
Fig. 11. Reconstruction of space target attitude angle. (a) Roll angle; (b) Pitch angle; (c) Yaw angle
Fig. 12. The relationship between attitude angle measurement error and angle amplitude
|
Table 1. [in Chinese]
| ||||||||||||||||
Table 2. [in Chinese]


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20