
Zhiyang Wu, Shuang Wang, Tiegen Liu, Dangpeng Jin. Automatic assembly positioning method of shield tunnel segments based on deep learning vision and laser assistance[J]. Infrared and Laser Engineering, 2022, 51(4): 20210183
- Infrared and Laser Engineering
- Vol. 51, Issue 4, 20210183 (2022)
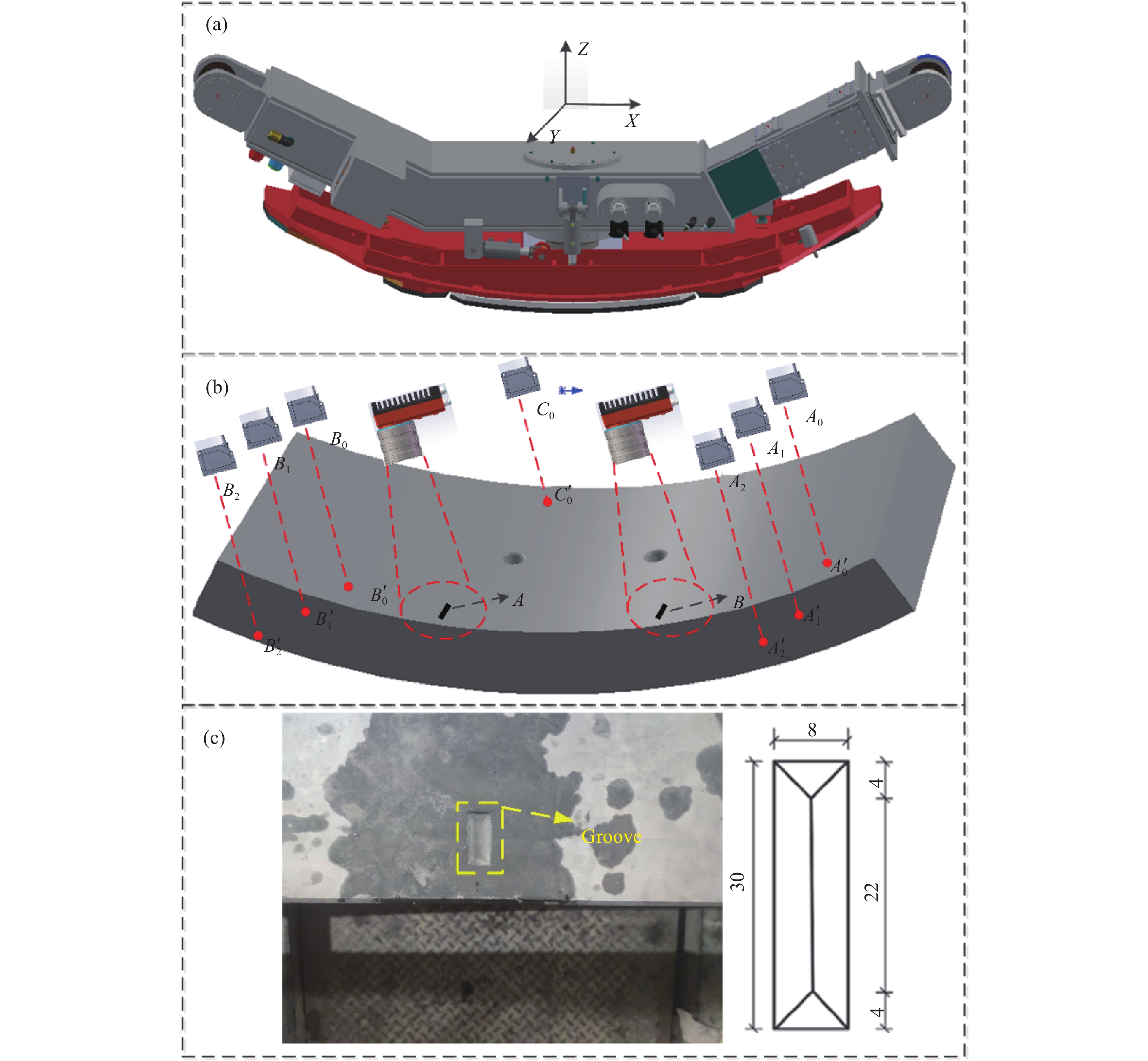
Fig. 1. (a) Mechanical structure diagram of the proposed erector; (b) Layout of the detection system; (c) Physical drawing and dimension drawing of groove (Unit: mm)
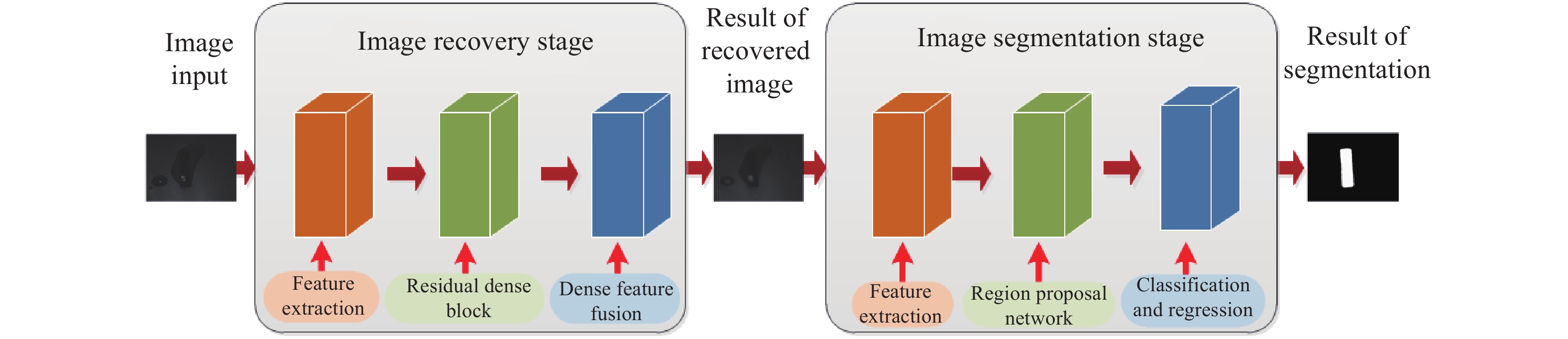
Fig. 2. Segment surface feature extraction framework based on two stage deep neural network
Fig. 3. Schematic diagram of network framework in image restoration stage
Fig. 4. (a) PSNR curve of the first stage; (b) Mask loss function curve of the second stage
Fig. 5. Comparison of different contour feature extraction methods. (a) and (b) Processing results based on the traditional Mask R-CNN algorithm; (c) and (d) Processing results based on proposed algorithm in the paper; (e) and (f) Processing results of original image based on proposed algorithm in the paper
Fig. 6. (a) CE value in X direction; (b) CE value in Y direction
Fig. 7. Experimental diagram of segment automatic assembly positioning
Fig. 8. Change curves of the mark coordinates detected by two cameras with the pose adjustment of the assembly machine during the process of camera grabbing and positioning
Fig. 9. Absolute value of grab positioning error
Fig. 10. Change curves of mark coordinates detected by two cameras with pose adjustment of assembly machine during camera positioning
Fig. 11. Absolute value of assembly positioning error

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20