
Dian Fei, Jianlin Chen, Dongsheng Liu, Zhijiang Zhang. Depth Camera-Based Location and Restoration of Special Surface[J]. Acta Optica Sinica, 2020, 40(21): 2115002
- Acta Optica Sinica
- Vol. 40, Issue 21, 2115002 (2020)
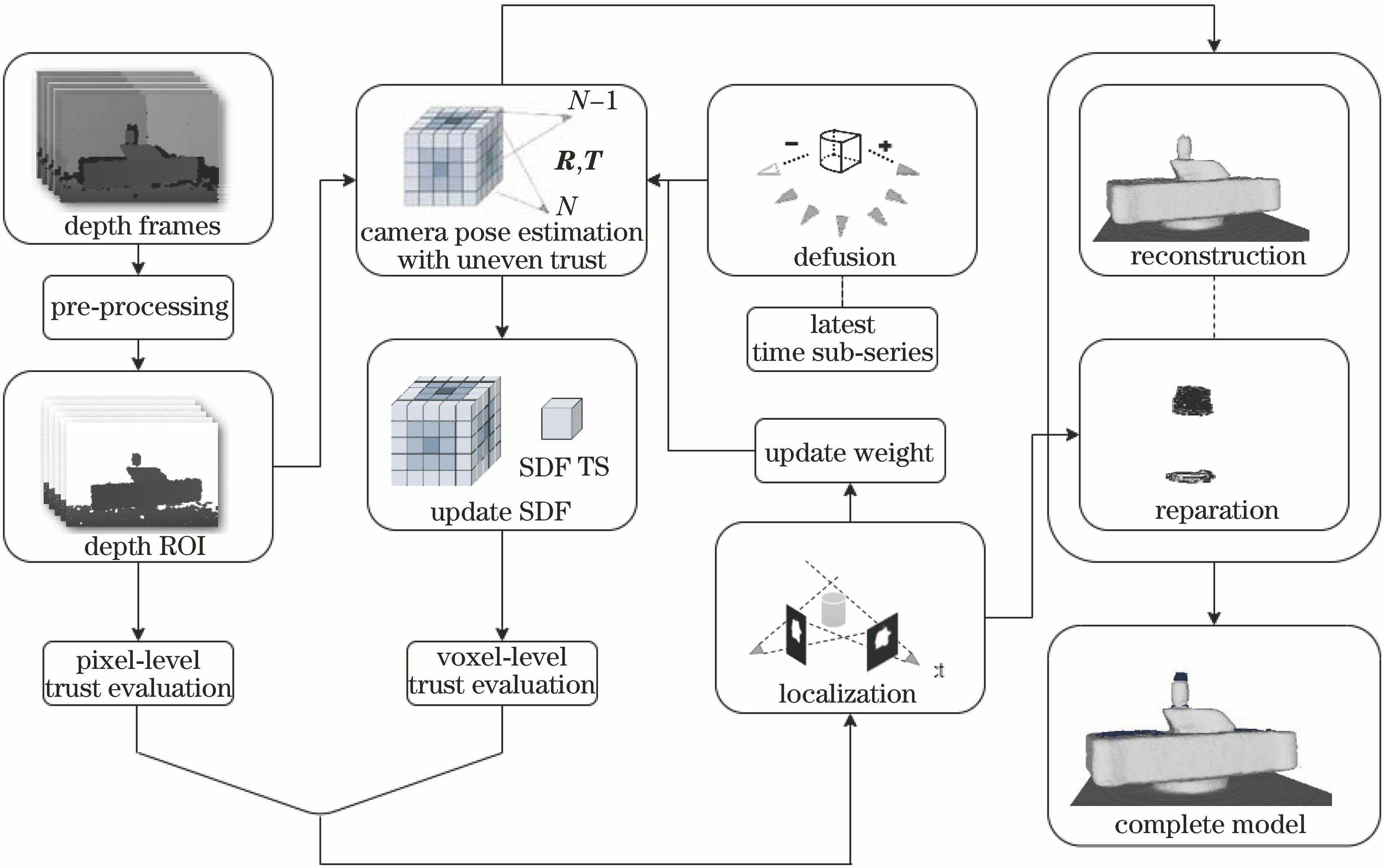
Fig. 1. Diagram of system

Fig. 2. Depth image preprocessing. (a) Raw depth image; (b) shadow noise area; (c) ROI segmentation; (d) reliability mask
Fig. 3. Depth histogram
Fig. 4. Weight setting near depth edge. (a) σ0 neighborhood range; (b) ωm function curve
Fig. 5. TSDF variation ηTS. (a) Color image; (b)-(d) ηTS<γl
Fig. 6. Reference frame FIFO queue
Fig. 7. Model reparation experiment. (a) Model before reparation; (b) model after reparation; (c) experimental environment and setting; (d) peculiar object; (e) model detail before reparation; (f) model detail after reparation
Fig. 8. Models corresponding to different pose results. (a) Experimental setting; (b) KinectFusion; (c) SDF-tracker; (d) proposed method
Fig. 9. Comparison of reconstruction results 1. (a) Experimental environment and setting; (b)camera pose; (c) result obtained by algorithm Ⅰ; (d) result obtained by proposed method
Fig. 10. Comparison of reconstruction results 2. (a) Experimental environment and setting; (b)camera pose; (c)(d) result obtained by algorithm Ⅰ; (e)(f) result obtained by proposed method
|
Table 1. Error analysis of pose tracking in experiment Ⅰmm
|
Table 2. Error analysis of pose tracking in experiment Ⅱmm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20