
Liqing Yue, Xin Jia, Yang Miao, Hui Liu, Wenjin Wu, Qing Sui. High precision calibration for internal and external parameter of manipulator binocular vision system[J]. Infrared and Laser Engineering, 2021, 50(9): 20200525
- Infrared and Laser Engineering
- Vol. 50, Issue 9, 20200525 (2021)
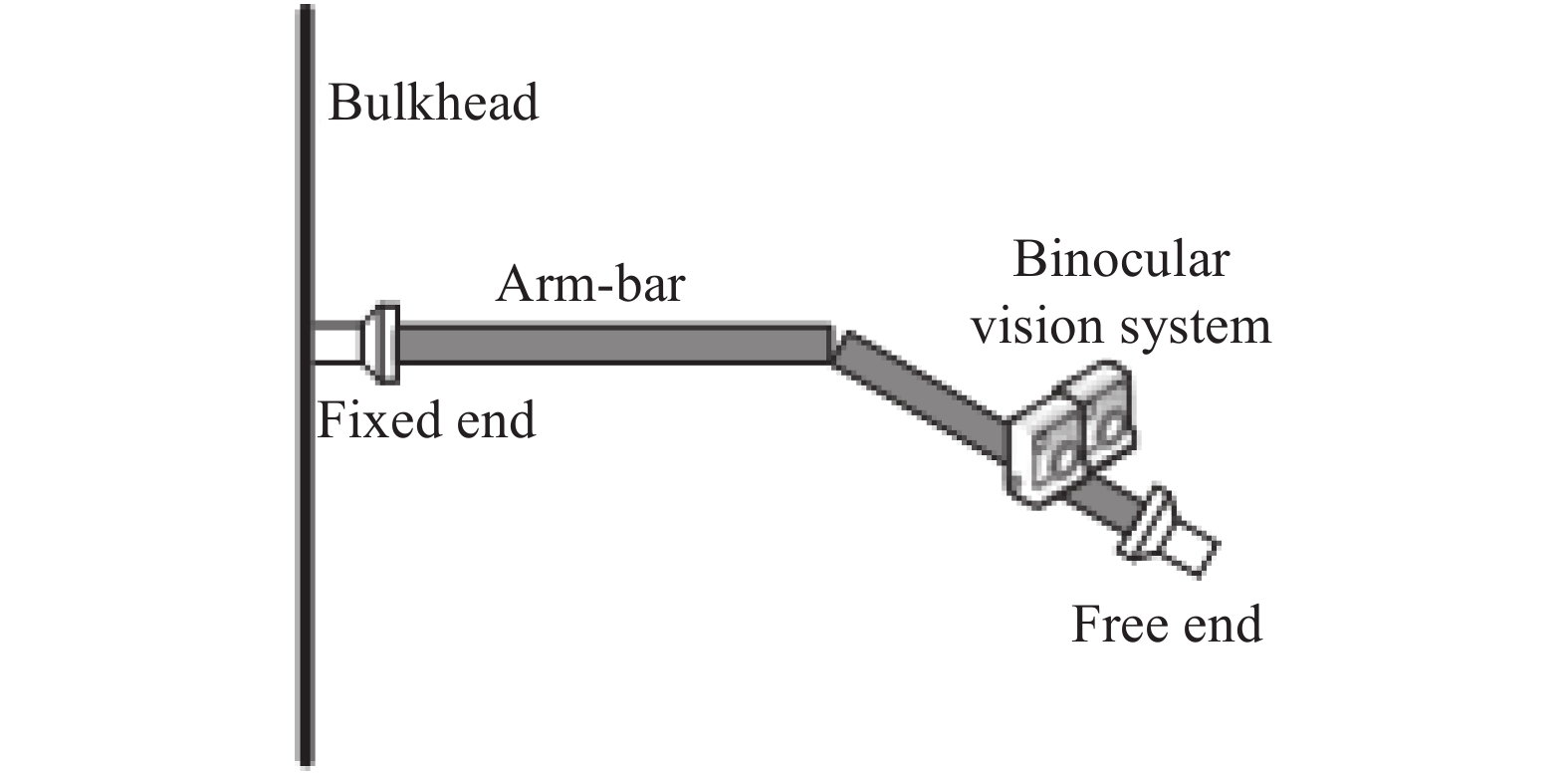
Fig. 1. Binocular vision system
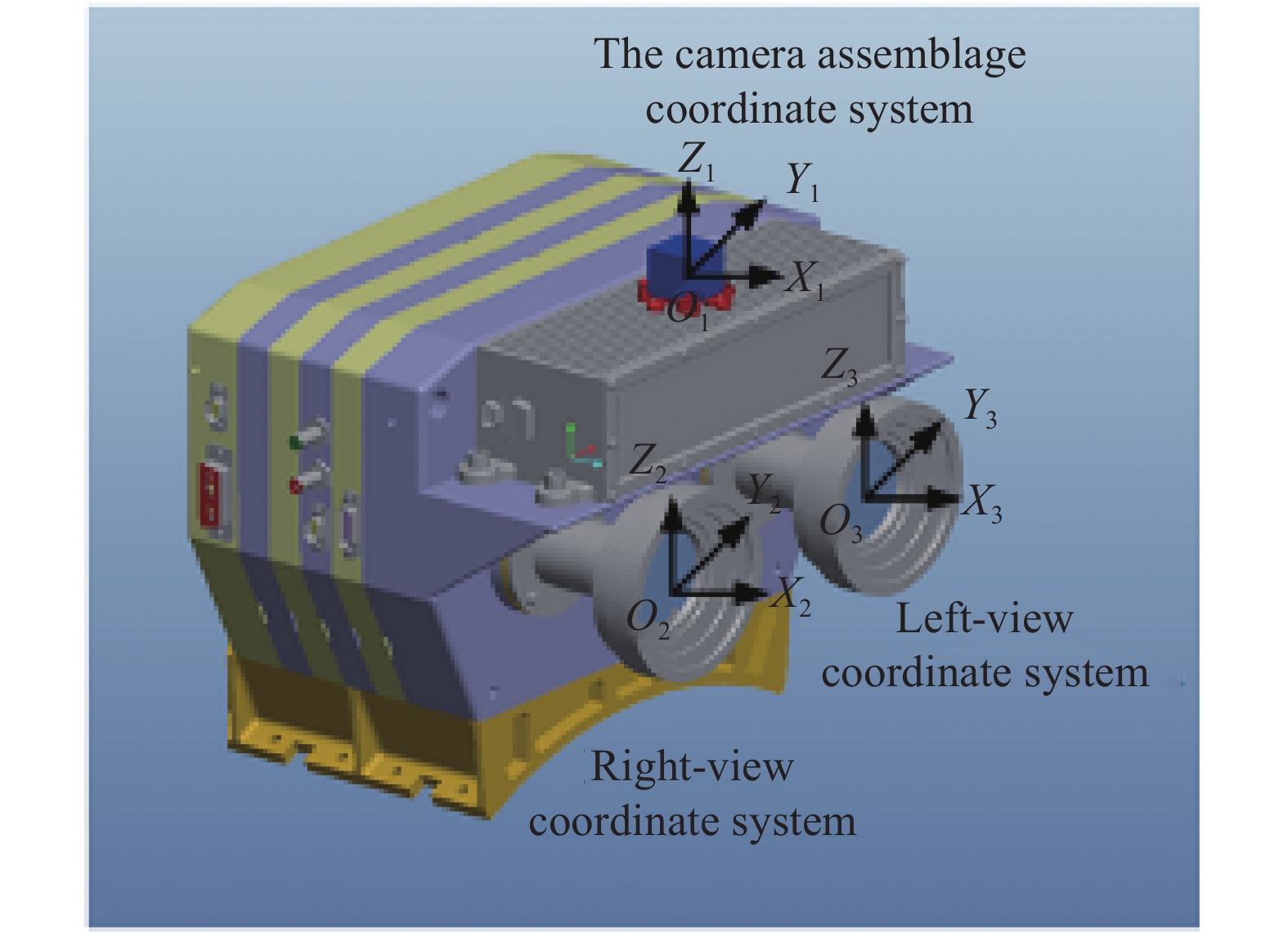
Fig. 2. Definition of the coordinate system
Fig. 3. Principle of internal reference test
Fig. 4. Test of camera coordinate system of binocular vision system
Fig. 5. Establish the relationship of the 3D target coordinate system and the camera assemblage coordinate system
Fig. 6. Translate of coordinate system
Fig. 7. Principle of spatial rear intersection based on three control points
| ||||||||||||||||
Table 1. Calibration requirements of internal and external parameters of binocular vision system
|
Table 2. Calibration results of internal parameter of binocular vision system
|
Table 3. Coordination of points in the cubic assemblage coordinate system
|
Table 4. Coordination of points in the left-view camera coordinate system
|
Table 5. Coordination of points in the right-view camera coordinate system
| |||||||||||||||||||||||||||||
Table 6. External parameters of the binocular vision system

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20