
Yufeng Wang, Xiaoming Cao, Jing Zhang, Liu Tang, Yuehui Song, Huige Di, Dengxin Hua. Detection and Analysis of All-Day Atmospheric Water Vapor Raman Lidar Based on Wavelet Denoising Algorithm[J]. Acta Optica Sinica, 2018, 38(2): 0201001
- Acta Optica Sinica
- Vol. 38, Issue 2, 0201001 (2018)
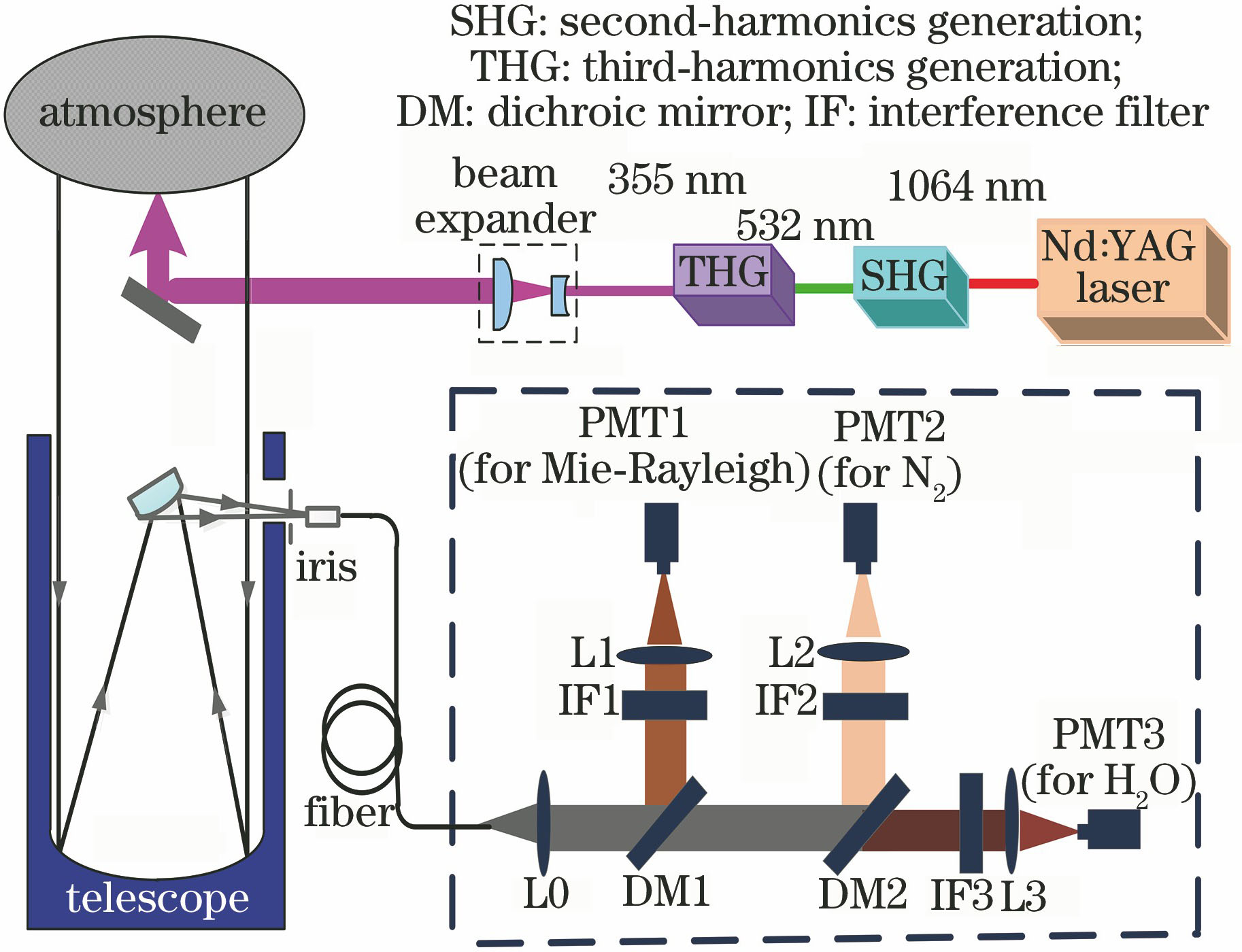
Fig. 1. Schematic of Raman lidar system for water vapor measurement
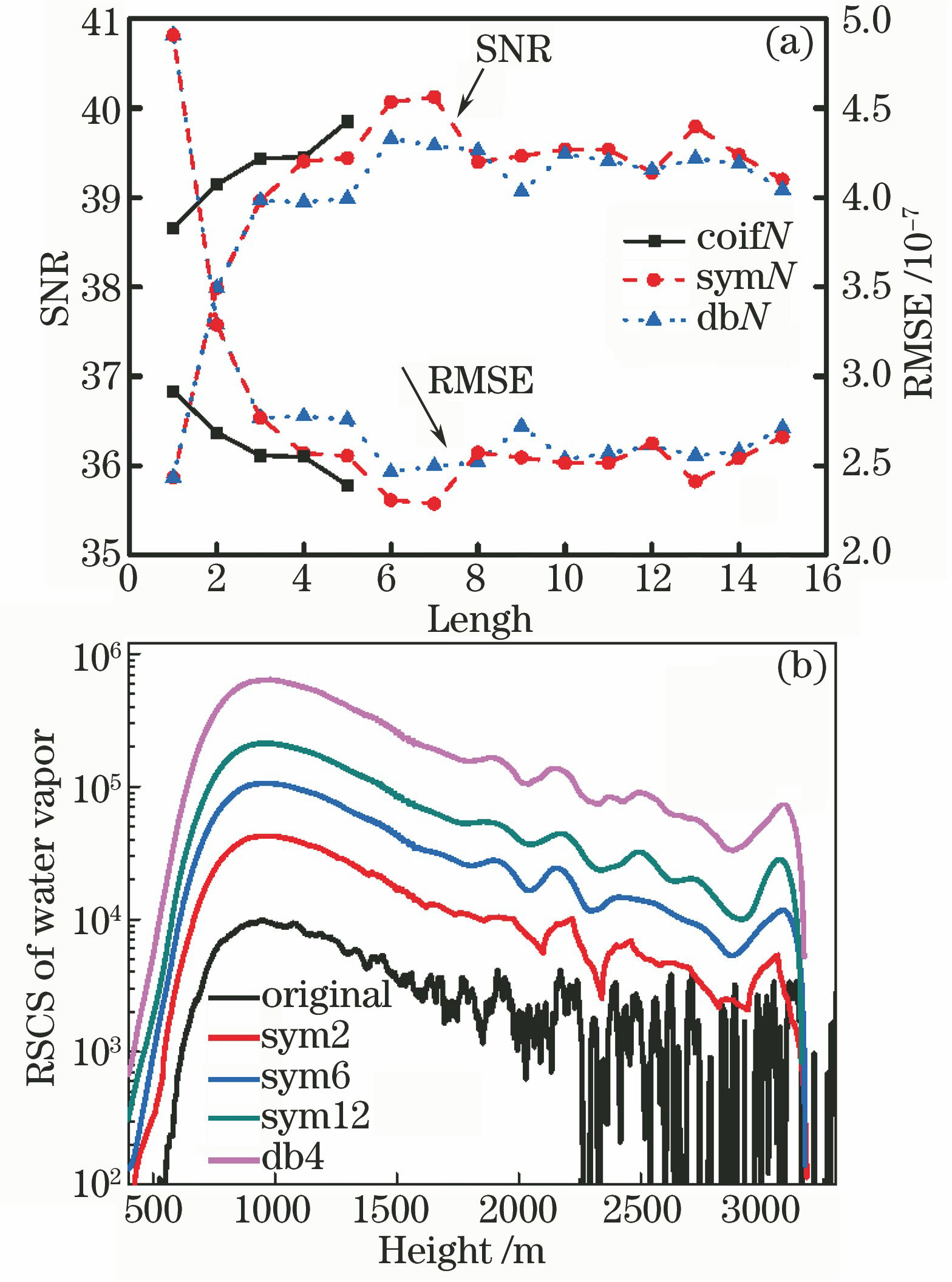
Fig. 2. Comparison of water vapor Raman scattering signals before and after denoising detected in daytime. (a) SNR and RMSE denoised by wavelet basis with different filter lengths; (b) comparison of range-square-corrected results before and after denoising
Fig. 3. Comparison of Mie-Rayleigh scattering signals before and after denoising in daytime. (a) SNR and RMSE denoised by wavelet basis with different filter lengths; (b) comparison of range-square-corrected results before and after denoising
Fig. 4. Denoising results of daytime water vapor Raman scattering signals denoised with different threshold functions
Fig. 5. Denoising results of water vapor Raman scattering signals denoised by different threshold acquisition methods in daytime. (a) RSCS; (b) SNR and RMSE
Fig. 6. Denoising results of Mie-Rayleigh scattering signals denosied by different threshold acquisition methods in daytime. (a) RSCS; (b) SNR and RMSE
Fig. 7. Comparison of lidar detection results before and after denoising in daytime. (a) RSCS of water vapor and nitrogen Raman scattering; (b) water vapor mixing ratio profile; (c) SNR of water vapor detection
Fig. 8. Regression relationship of lidar signal before and after denoising. (a) Mie Rayleigh scattering signal; (b) water vapor Raman scattering signal
Fig. 9. THI displays of water vapor mixing ratio in 2016-09-22 00∶00-2016-09-23 00∶00 before and after denoising. (a) Before denoising; (b) after denoising
Fig. 10. Variation of water vapor mixing ratio taken by meteorological station in 2016-09-22 00∶00-2016-09-23 00∶00
|
Table 1. Specification parameters of Raman lidar system

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20