
Tao Long, Chang Su, Jian Wang. Learning Feature Point Descriptors for Detail Preservation[J]. Laser & Optoelectronics Progress, 2022, 59(22): 2215002
- Laser & Optoelectronics Progress
- Vol. 59, Issue 22, 2215002 (2022)
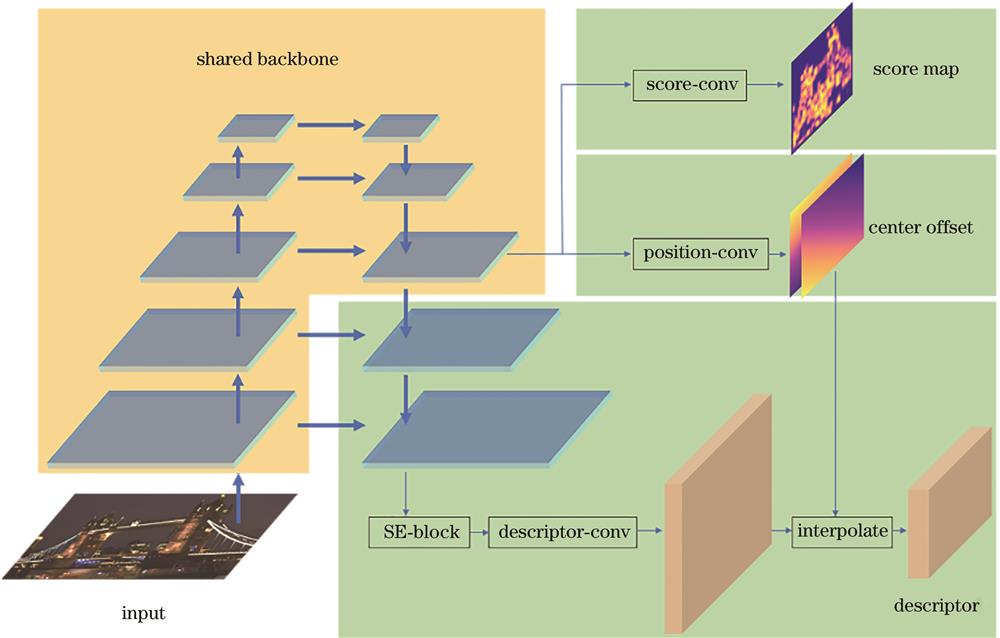
Fig. 1. Neural network architecture of feature point extraction
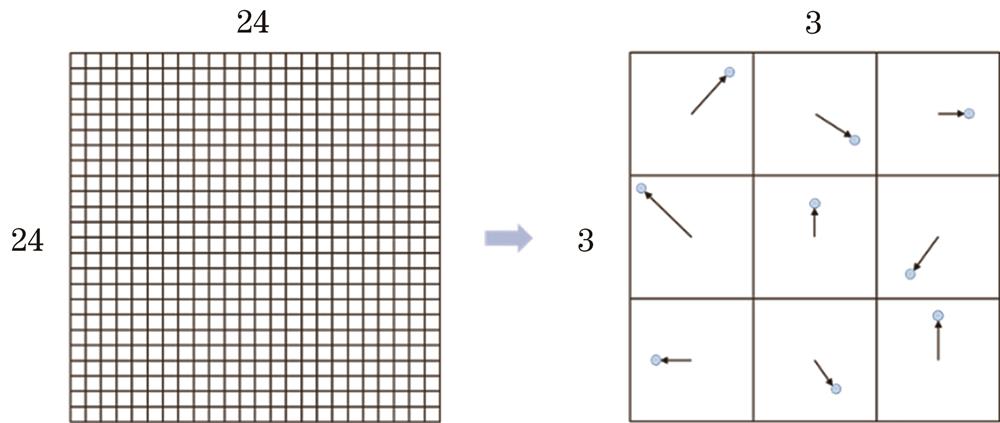
Fig. 2. Schematic diagram of center offset of position prediction
Fig. 3. Flow chart of homography estimation
Fig. 4. Schematic diagram of homography error calculation
Fig. 5. Failure case of baseline feature matching
Fig. 6. Qualitative results of proposed method on images pairs on HPatches dataset. (a)Illumination cases.; (b) rotation cases; (c) perspective cases
|
Table 1. Comparison of experimental results of different network structures
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Comparison of key point detection performance of different methods
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Comparison of homography estimation and matching performance of different methods
|
Table 4. Comparison of experimental results on different data subsets

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20