
Guo Keyou, Yang Min, Zhang Mo, Guo Xiaoli, Li Xue. Real-Time Monocular Depth Estimation Method Based on Perspective N-Point model[J]. Laser & Optoelectronics Progress, 2021, 58(6): 615005
- Laser & Optoelectronics Progress
- Vol. 58, Issue 6, 615005 (2021)
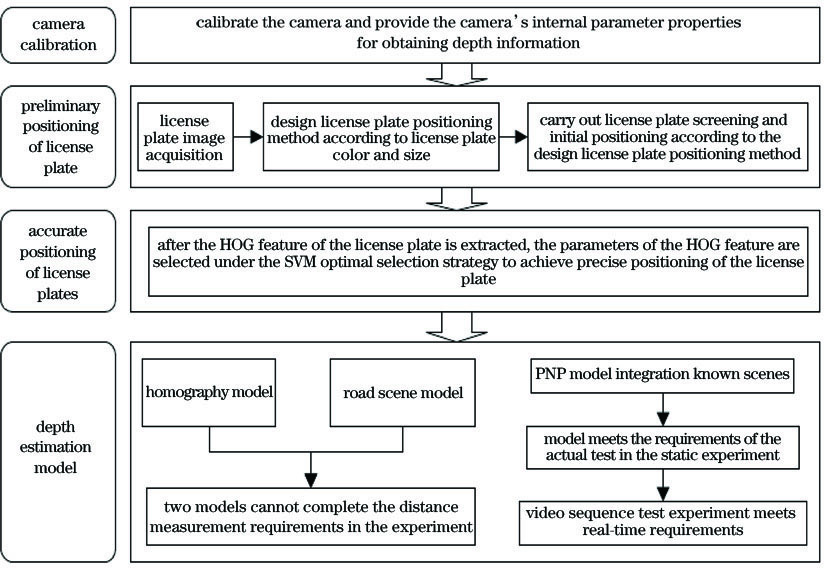
Fig. 1. Specific implementation process of our method
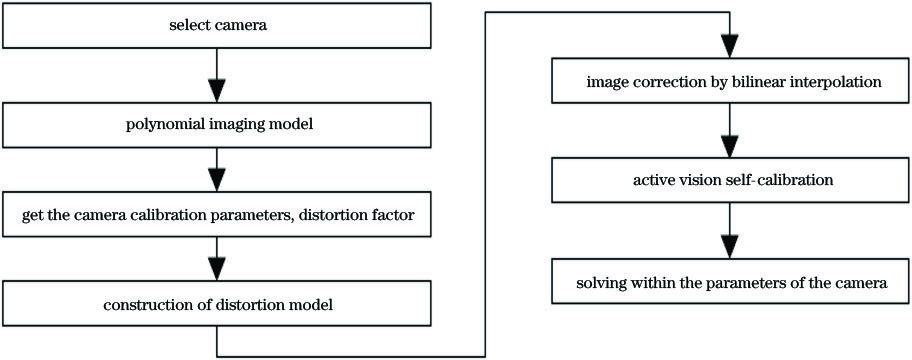
Fig. 2. Flow chart of the camera calibration
Fig. 3. Flow chart of the license plate location algorithm
Fig. 4. License plate images obtained through preliminary screening
Fig. 5. Schematic diagram of the homography model
Fig. 6. Simplified geometry model of road scene. (a) Depth geometry model; (b) road model of the vehicle-mounted camera and imaging diagram; (c) principle of the vertical imaging ; (d) principle of the horizontal imaging
Fig. 7. Model of the quadrilateral space object point coordinate system
Fig. 8. Depth measurement result
Fig. 9. Application effect diagram of our method on video sequence. (a) Video sequence effect chart1; (b) video sequence effect chart2
|
Table 1. Combination characteristic license plate data selected by SVM
|
Table 2. Basic information of the objects

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20