
Guoqing Ma, Junjie Yu, Rongwei Zhu, Changhe Zhou. Optical multi-imaging–casting accelerator for fully parallel universal convolution computing[J]. Photonics Research, 2023, 11(2): 299
- Photonics Research
- Vol. 11, Issue 2, 299 (2023)
![Schematic of the optical multi-imaging–casting architecture: optical parallel convolution process with different convolutional strides s1 (a) and s2 (b); (c) optical architecture principle of OMica, where the beam splitter (BS) is a diffractive beam splitter; Oy is diffraction order in the y direction (indicated by different line types), and θ is the angle difference between any two adjacent diffraction orders in object space (θ1 and θ2 are diffraction angles of Oy =1 and Oy=2 diffraction orders, respectively); θ′ is the angle difference in image space (θ1′ and θ2′ are diffraction angles of Oy =1 and Oy=2 diffraction orders, respectively); d is the distance between matrix A and BS, and l is the distance between matrix B and the image of BS. a, b, and c are spot arrays corresponding to different diffraction orders diffracted from a BS. The imaging–casting system is composed of L1 and L2, with focal lengths f1 and f2. L3 is a focusing lens with focal length f3. s is the lateral shifts of the image of diffraction orders of DG on the SLM2 plane corresponding to the convolutional stride, and this convolutional stride could be tunable by changing the distance d [s1 and s2 correspond to different convolutional strides shown in (a) and (b)].](/richHtml/prj/2023/11/2/299/img_001.jpg)
Fig. 1. Schematic of the optical multi-imaging–casting architecture: optical parallel convolution process with different convolutional strides s 1 s 2 O y y θ θ 1 θ 2 O y = 1 O y = 2 θ ′ θ 1 ′ θ 2 ′ O y = 1 O y = 2 d A l B a b c L 1 L 2 f 1 f 2 L 3 f 3 s SLM 2 d s 1 s 2
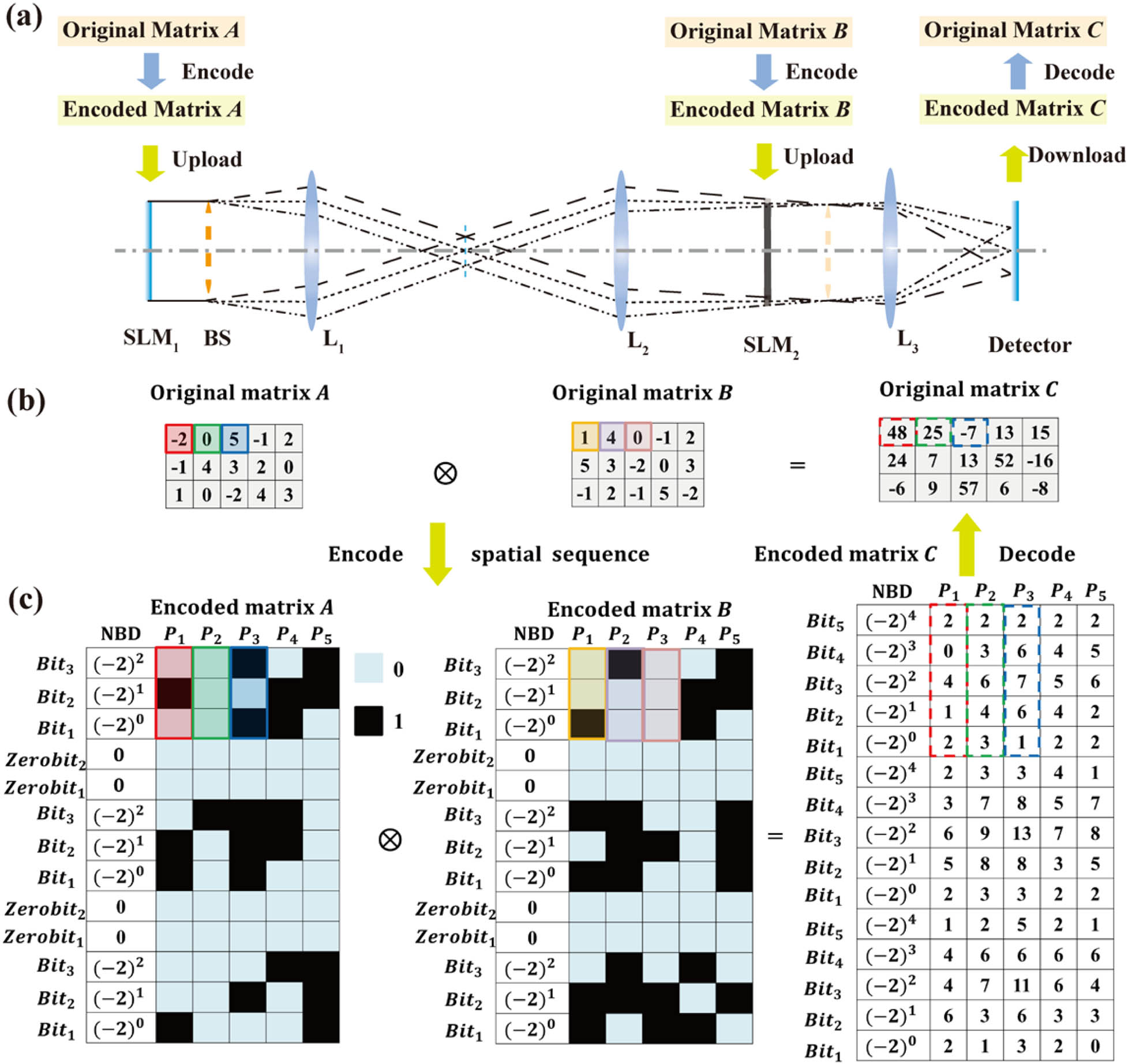
Fig. 2. Procedure of converting the original grayscale matrix with negative elements into encoded matrices of NBD. (a) The encoding matrices are loaded into the OMica system to compute the convolution, with the experimental encoded convolutional result decoded into the original matrix. (b) Original grayscale matrices A B C A B C
Fig. 3. Experimental results of hybrid analog–digital matrix convolution for two groups of matrices based on spatial sequence encoding. The subfigures from left to right are the light intensity distribution of the spot array denoting the convolution, theoretical convolutional values, experimental convolutional results, error map between theoretical and experimental results, and decoded convolutional results, respectively, in (a) matrices A 1 B 1 A 2 B 2
Fig. 4. Experimental results of high-accuracy convolution for two groups of grayscale matrices. (a), (b) Randomly generated 8-bit grayscale 10 × 10 A 3 B 3 20 × 20 A 4 B 4
Fig. 5. Inference process for the convolutional neural network performed by OMica based on the MNIST dataset. (a) Execution of convolution operation by encoding each original convolutional kernel into high-bit and low-bit kernels; (b) schematic of the optical convolutional architecture performing CNN inference; (c) absolute error AE map comparing theoretical and experimental results of the convolution of a handwritten digit 7 as an input; confusion matrix of blind-testing 1000 images from the MNIST dataset when matrix convolutions are executed by the optical hardware (d) and by pure electric hardware (e). The purple box marks the first convolutional kernel to realize the whole process of encoding, convolution, and decoding.
Fig. 6. Schematic of the optical convolution experimental system using the DG. LED, light-emitting diode with wavelength λ = 450 nm M 1 – 6 AP 1 , 2 , 3 L 1 – 5 L 6 L 7 L 10 PBS 1 , 2 , 3 SLM 1 SLM 2 sCMOS 1 CMOS 2 d 0 s = 1 B
Fig. 7. Photographs of the experiment system of OMica. (a) Entire optical system; (b) SLM mounted on a 4D manual stage for loading kernel A B sCMOS 1 CMOS 2
Fig. 8. Typical patterns loaded onto two SLMs for alignment. (a) Alignment pattern and (b) square array pattern.
Fig. 9. Experimental results for demonstration of kernel sliding. (a), (b) Images loaded onto two SLMs. (c)–(j) Images captured by the monitoring CMOS 2
Fig. 10. 1 × 20 1 × 28
Fig. 11. Intensity and angle distribution of 20 × 28
Fig. 12. Experimental convolutional results for 180 × 224
Fig. 13. Schematic of the CNN architecture.
Fig. 14. Learning curve of the CNN.
Fig. 15. Typical error maps between convolutional results obtained from the optical hardware and that of an electrical computer with the full precision of different input handwritten digits (from 0 to 9) for these 10 convolutional kernels after encoding.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20