
Zhiwei Ai, Jianbo Ji, Pengjv Wang, Jing Li, Haoyang Zhou. Integrative design of structure control for two-axis fast steering mirror with flexible support[J]. Infrared and Laser Engineering, 2020, 49(7): 20190479
- Infrared and Laser Engineering
- Vol. 49, Issue 7, 20190479 (2020)
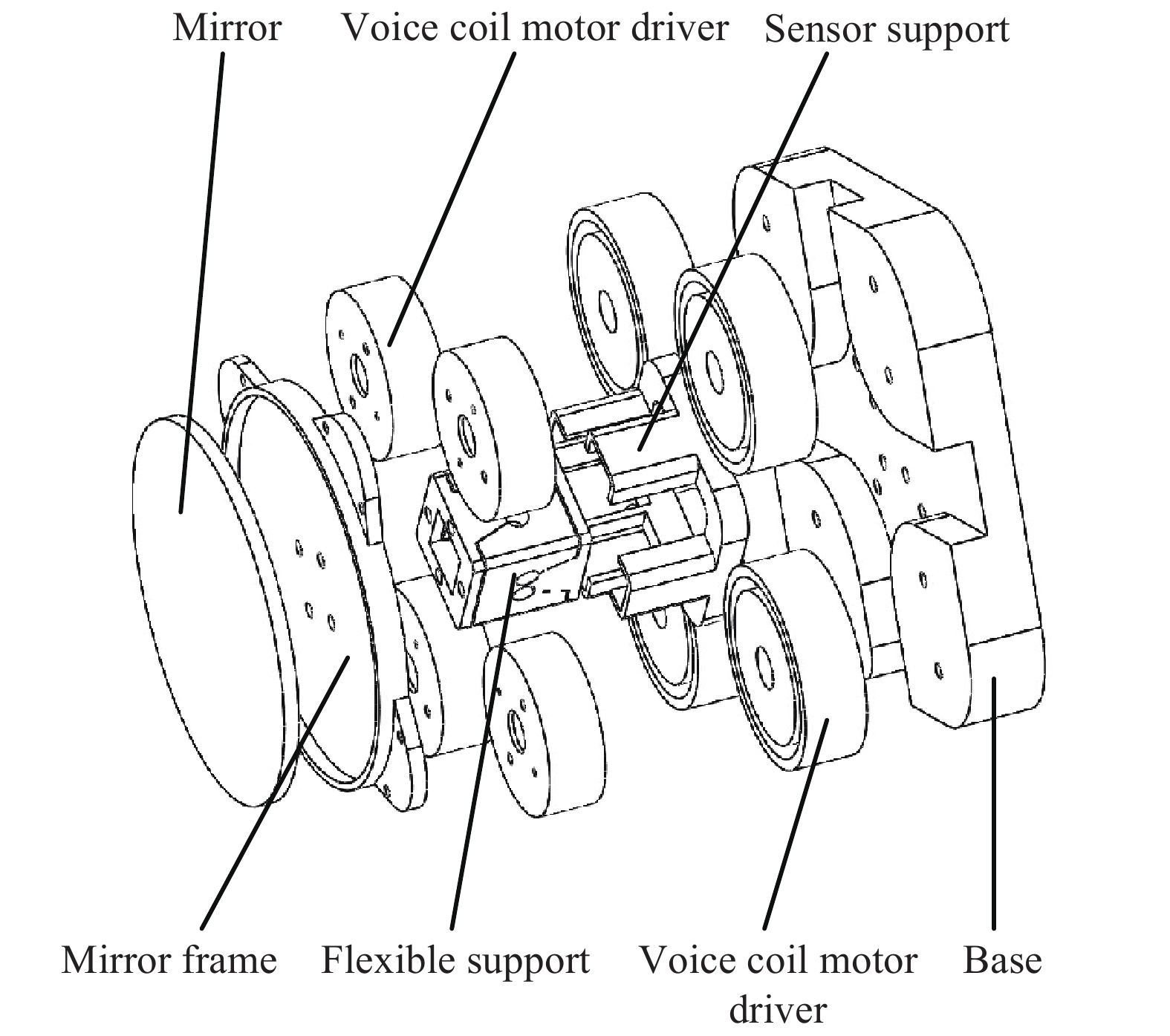
Fig. 1. Structure component of fast steering mirror
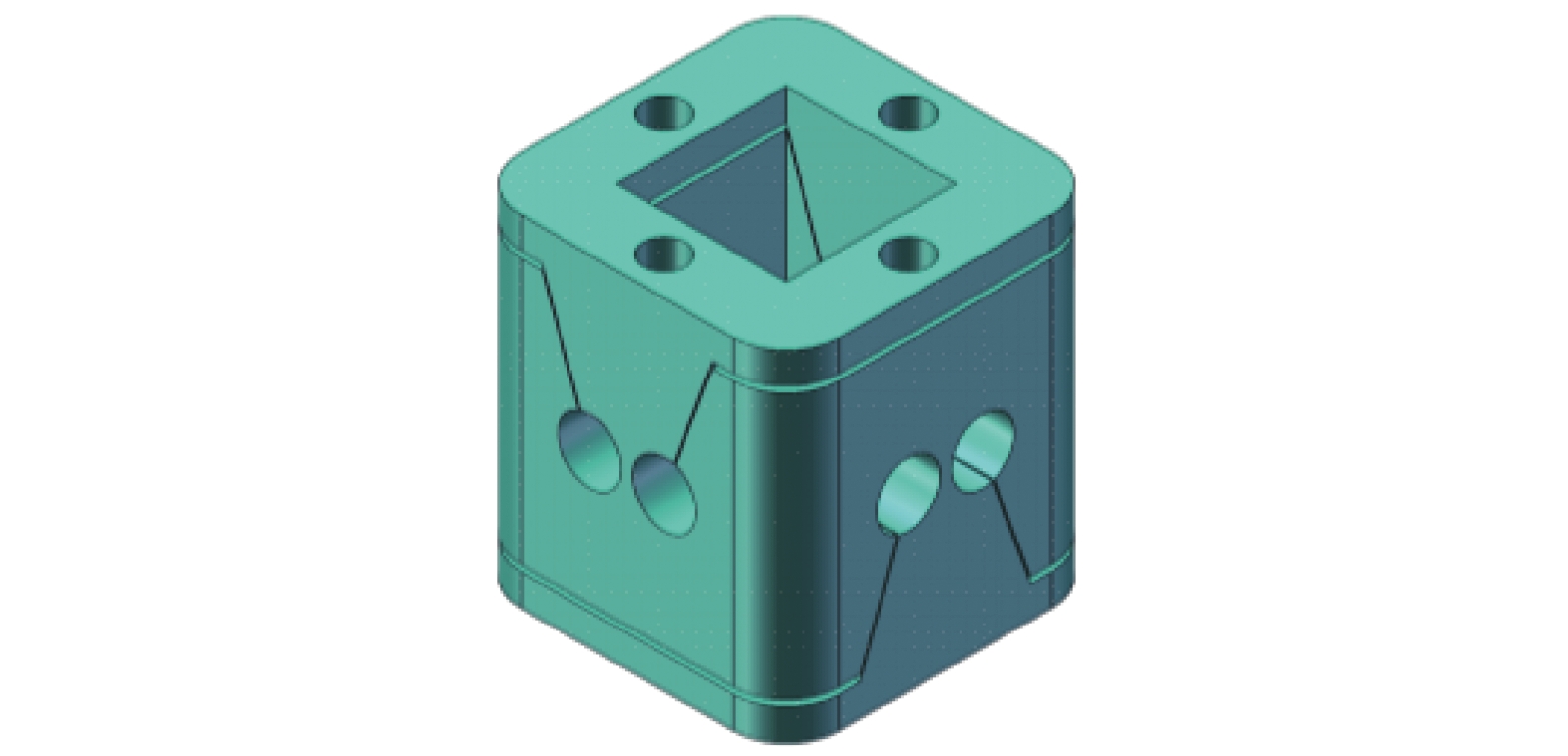
Fig. 2. Structure of flexible support
Fig. 3. Structure and force diagram of flexible hinge
Fig. 4. Voice coil motor driving and load model
Fig. 5. Open loop control diagram of fast steering mirror
Fig. 6. Frequency response characteristics of the output force of voice coil motor to the position of mirror
Fig. 7. Open-loop frequency response characteristics
Fig. 8. Frequency response characteristics of closed loop control system
Fig. 9. Step response of closed loop control system
Fig. 10. Finite element analysis result of swing part
Fig. 11. Frequency response characteristic of motion axis
Fig. 12. Control signal
Fig. 13. Kinematics model of swing parts
Fig. 14. Output angle signal of mirror
|
Table 1. Design index of fast steering mirror
|
Table 2. Material properties of swing parts
|
Table 3. Mass properties of swing part of fast steering mirror
|
Table 4. Performance parameters of voice coil motor
|
Table 5. Structure parameters of flexible hinge

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20