
Hongzhi Du, Teng Zhang, Yanbiao Sun, Linghui Yang, Jigui Zhu. Stereo Matching Method Based on Gated Recurrent Unit Networks[J]. Laser & Optoelectronics Progress, 2021, 58(14): 1415001
- Laser & Optoelectronics Progress
- Vol. 58, Issue 14, 1415001 (2021)
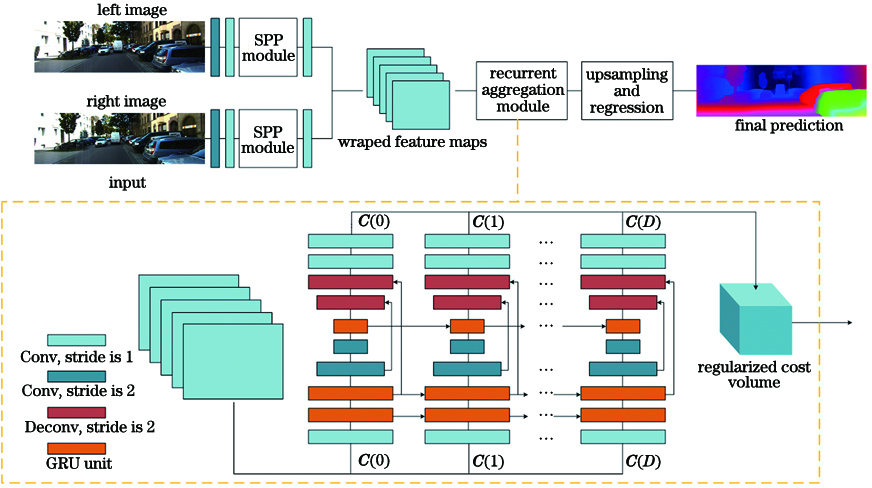
Fig. 1. Proposed network structure
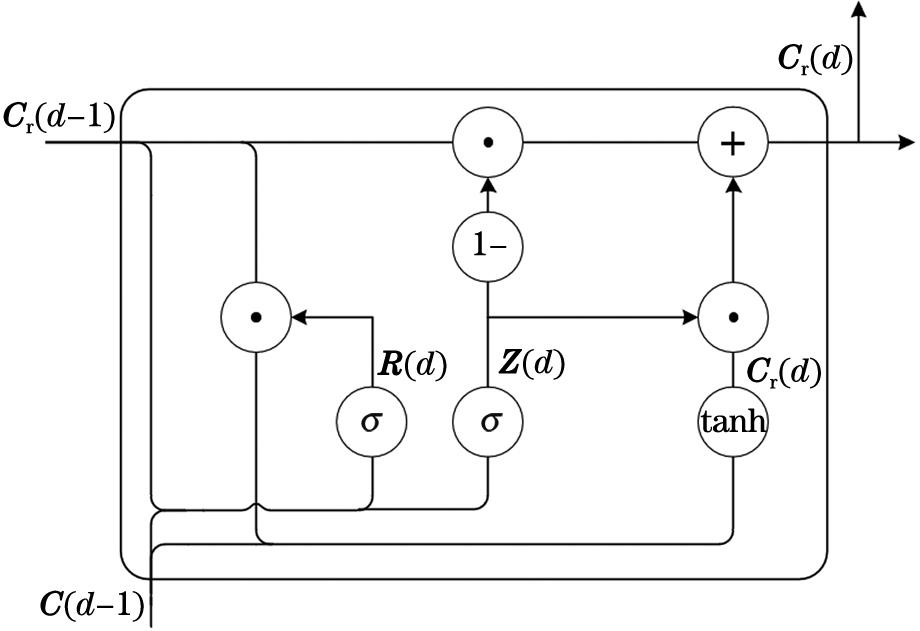
Fig. 2. GRU structure
Fig. 3. Stacked GRU structure
Fig. 4. Result of the disparity estimation. (a) Left images; (b) stacked GRU; (c) proposed method; (d) ground truth
Fig. 5. Result of the disparity estimation on KITTI2015 test dataset. (a) Left image; (b) PSMNet; (c) proposed method
|
Table 1. Parameters of recurrent aggregation module
|
Table 2. Comparison of different cost aggregation modules
|
Table 3. Performance evaluation of different methods on Scene Flow test dataset
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 4. Evaluation of different method on KITTI2015 test dataset
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 5. Evaluation of different methods on KITTI2012 test dataset unit: %

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20