
Yan Yao, Likun Hu, Jun Guo. Improved Lightweight Semantic Segmentation Algorithm Based on DeepLabv3+ Network[J]. Laser & Optoelectronics Progress, 2022, 59(4): 0410015
- Laser & Optoelectronics Progress
- Vol. 59, Issue 4, 0410015 (2022)
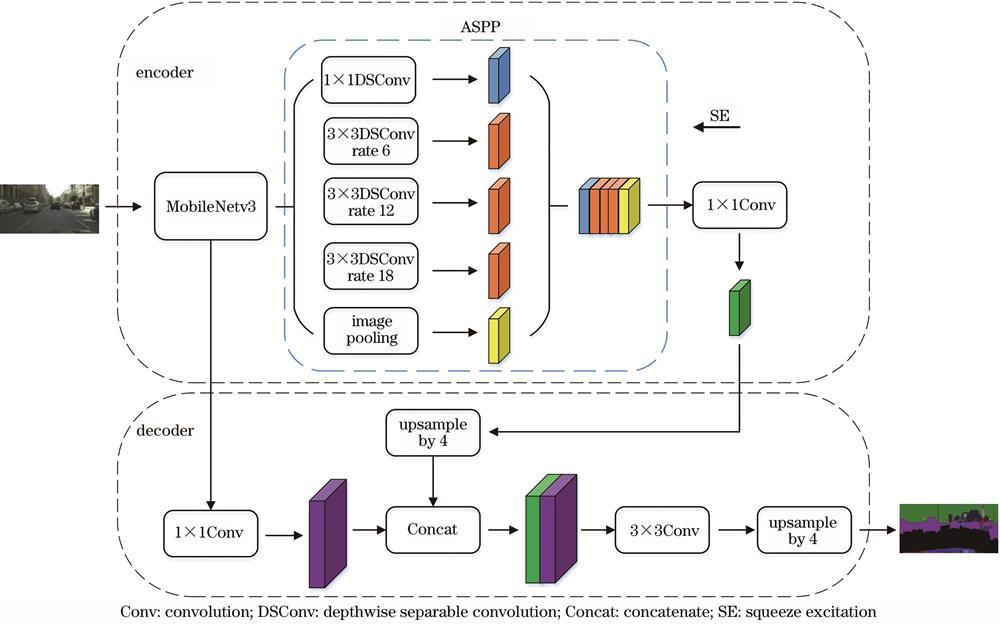
Fig. 1. Improved DeepLabv3+network
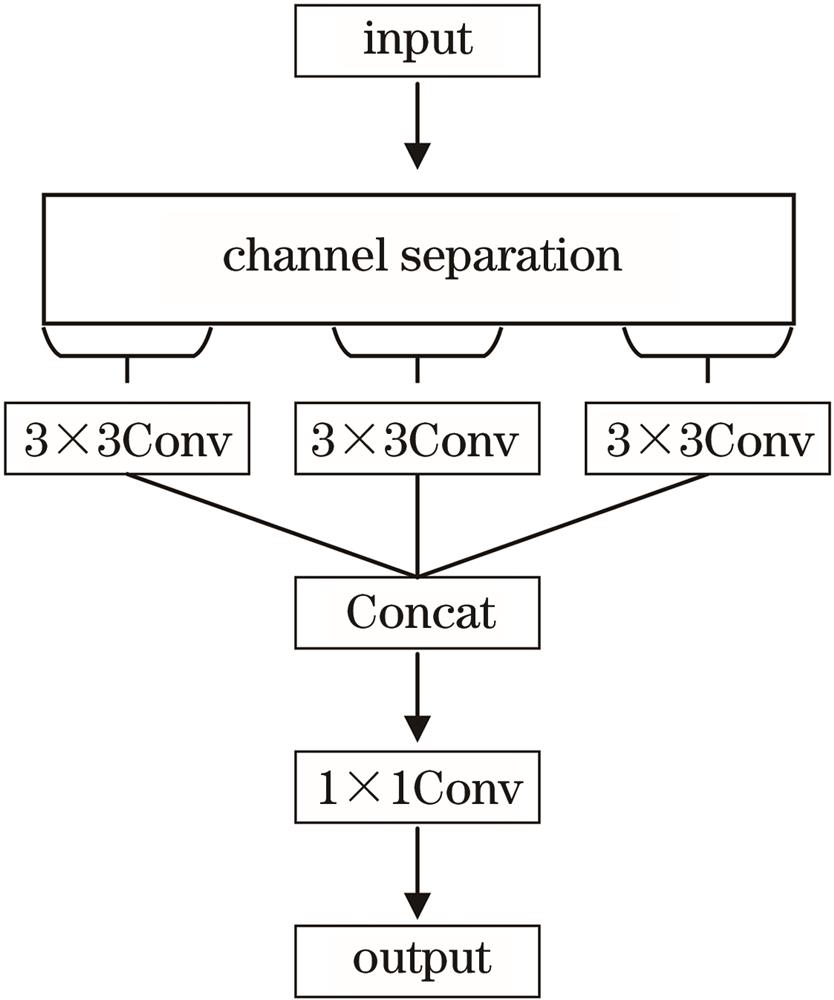
Fig. 2. Depthwise separable convolution
Fig. 3. Squeeze and excitation module
Fig. 4. Comparison of normalization methods. (a) BN; (b) GN
Fig. 5. Segmentation results of proposed algorithm. (a) Input images; (b) ground truth; (c) segmentation results
|
Table 1. Experimental parameters
|
Table 2. Comparison of Deeplabv3+ model performance of different backbone networks
|
Table 3. Comparison of different convolution methods
|
Table 4. Performance results for different modules on Cityscape
|
Table 5. Performance results for different modules on Foggy Cityscape
|
Table 6. Comparison of performance of different algorithms
|
Table 7. Comparison of lightweight image semantic segmentation algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20