
Gaopeng Zhao, Yupeng Shen, Jianyu Wang. Adaptive Feature Fusion Object Tracking Based on Circulant Structure with Kernel[J]. Acta Optica Sinica, 2017, 37(8): 0815001
- Acta Optica Sinica
- Vol. 37, Issue 8, 0815001 (2017)
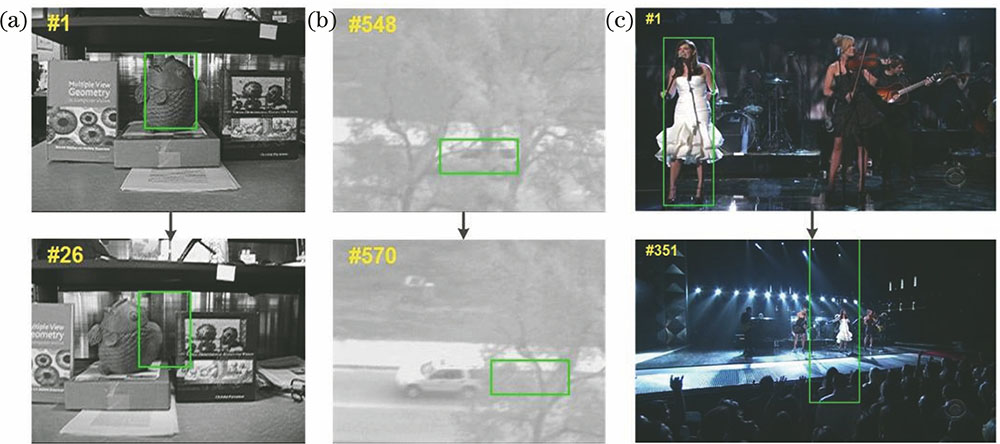
Fig. 1. Tracking results of CSK algorithm. (a) Illumination variation; (b) occlusion; (c) scale variation
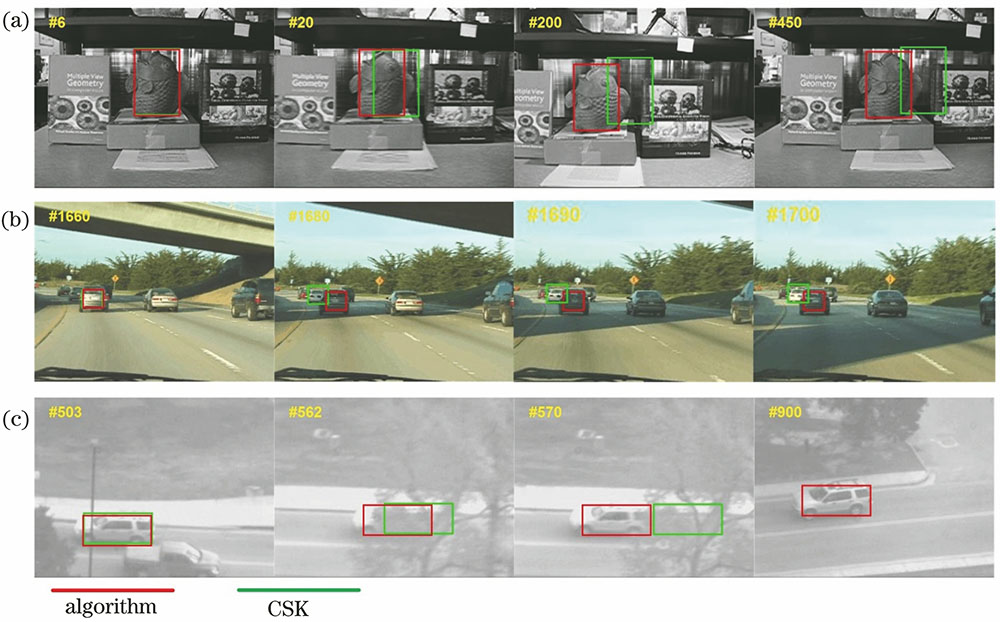
Fig. 2. Tracking results of the proposed algorithm and CSK algorithm. (a) Fish; (b) car24; (c) suv
Fig. 3. Center location error comparison of the proposed algorithm and CSK algorithm. (a) Fish; (b) car24; (c) suv
Fig. 4. Tracking results of different tracking algorithms. (a) Bird2; (b) bolt2; (c) human8; (d) jogging2; (e) car1; (f) walking2
Fig. 5. Distance precision of tracking algorithms. (a) Bird2; (b) bolt2; (c) human8; (d) jogging2; (e) car1; (f) walking2
Fig. 6. Success rate of tracking algorithms. (a) Bird2; (b) bolt2; (c) human8; (d) jogging2; (e) car1; (f) walking2
|
Table 1. Characteristics of video sequences in the experiment
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Distance precision of different tracking algorithms
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Success rate of different tracking algorithms
| ||||||||||||||||||||||||||||||||||
Table 4. Complexity analysisframe·s-1

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20