
Qingda Guo, Yanming Quan. Depth Image Point Cloud Segmentation Using Spatial Projection[J]. Acta Optica Sinica, 2020, 40(18): 1815001
- Acta Optica Sinica
- Vol. 40, Issue 18, 1815001 (2020)
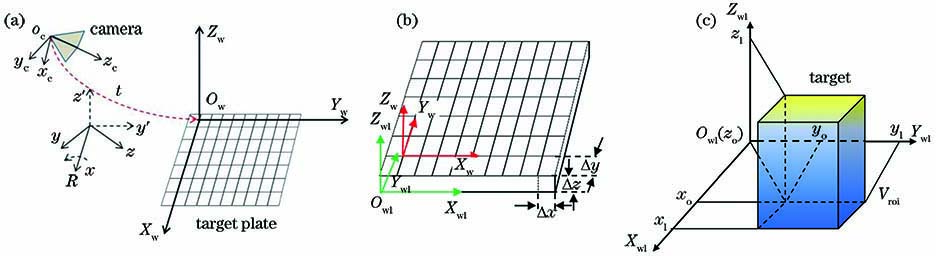
Fig. 1. Target world coordinate system and point cloud region. (a) World coordinate system; (b) target coordinate system; (c) determination of target effective region
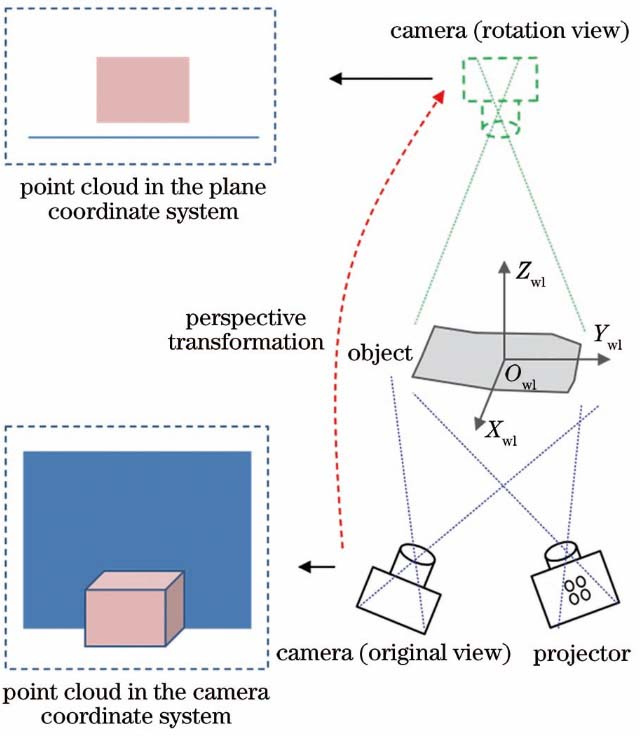
Fig. 2. Point cloud segmentation model of perspective transformation
Fig. 3. Diagram of hardware system
Fig. 4. Three scene images and corresponding point clouds. (a)--(c) Scene images; (d)--(f) point clouds
Fig. 5. Point cloud segmentation of scene 1#. (a) Corrected image; (b) Otsu threshold segmentation; (c) point clouds after image threshold segmentation; (d) established world coordinate system; (e) point clouds after compensation; (f) segmented point clouds in target coordinate system; (g) new 2D image; (h) dilated image; (i) segmented ROI image; (j) segmented point clouds by spatial projection
Fig. 6. Comparison of point cloud segmentation results for three scenes obtained by four methods. (a)--(c) Algorithm I; (d)--(f) algorithm II; (g)--(i) algorithm III; (j)--(l) algorithm Ⅳ
Fig. 7. Number of segmented point clouds under different structure types and point cloud expansion structural element values
Fig. 8. Influence of point cloud expansion structural element value on point cloud segmentation result. (a) Value is 3; (b) value is 4; (c) value is 5; (d) value is 6
Fig. 9. Point cloud segmentation of different objects. (a) Box; (b) kettle; (c) mask; (d) pillow; (e) point cloud of box; (f) point cloud of kettle; (g) point cloud of mask; (h) point cloud of pillow
|
Table 1. Comparison of numbers of segmented point clouds and execution time of four segmentation methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20