
Zaifeng Shi, Cheng Sun, Qingjie Cao, Zhe Wang, Qiangqiang Fan. Multi-Task Learning Tracking Method Based on the Similarity of Dynamic Samples[J]. Laser & Optoelectronics Progress, 2021, 58(16): 1615002
- Laser & Optoelectronics Progress
- Vol. 58, Issue 16, 1615002 (2021)
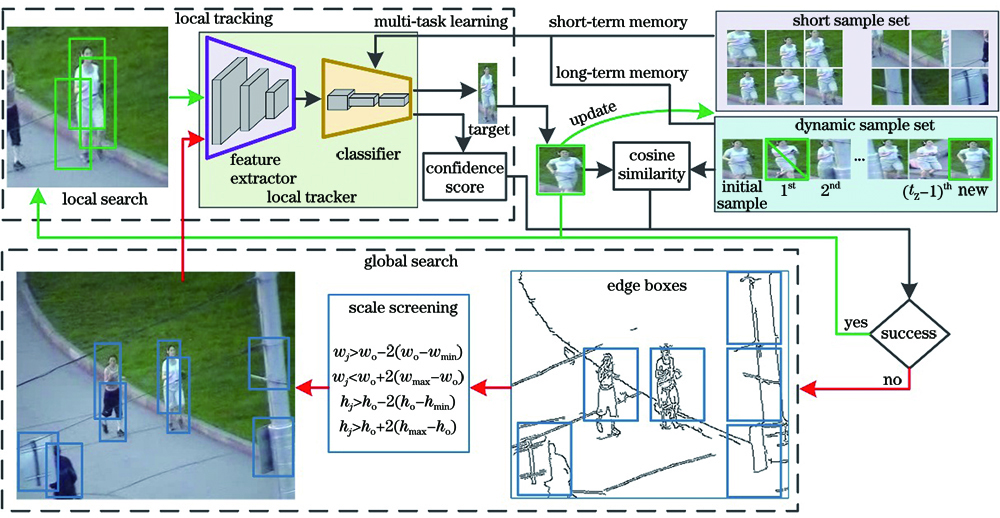
Fig. 1. Flow chart of the tracking method
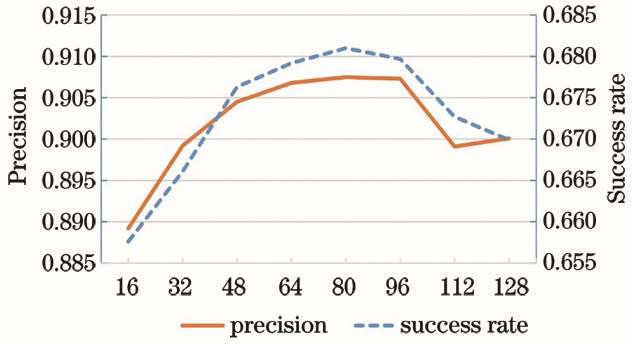
Fig. 2. Tracking results under different tz values
Fig. 3. Testing results of the OTB-2015 dataset. (a) Precision; (b) success rate
Fig. 4. Tracking results of four video sequences. (a) Bird1; (b) Box; (c) Girl2; (d) Matrix
|
Table 1. Implementation flow of the tracking method
|
Table 2. Results of ablation experiments
|
Table 3. Tracking precision of 11 challengeable attributes
|
Table 4. Testing result of the VOT-2016 dataset

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20