
Zhenyang Hui, Na Li, Penggen Cheng, Zhuoxuan Li, Zhaochen Cai. Single Tree Segmentation Method for Terrestrial LiDAR Point Cloud Based on Connectivity Marker Optimization[J]. Chinese Journal of Lasers, 2023, 50(6): 0610002
- Chinese Journal of Lasers
- Vol. 50, Issue 6, 0610002 (2023)
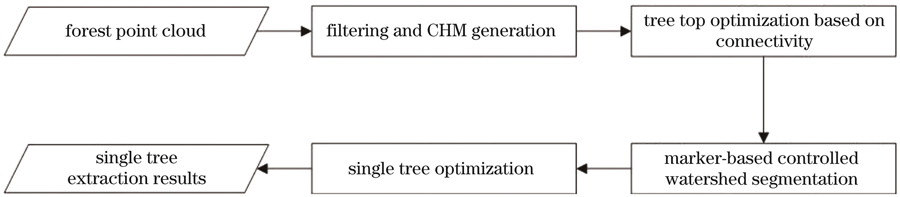
Fig. 1. Flow diagram of proposed method
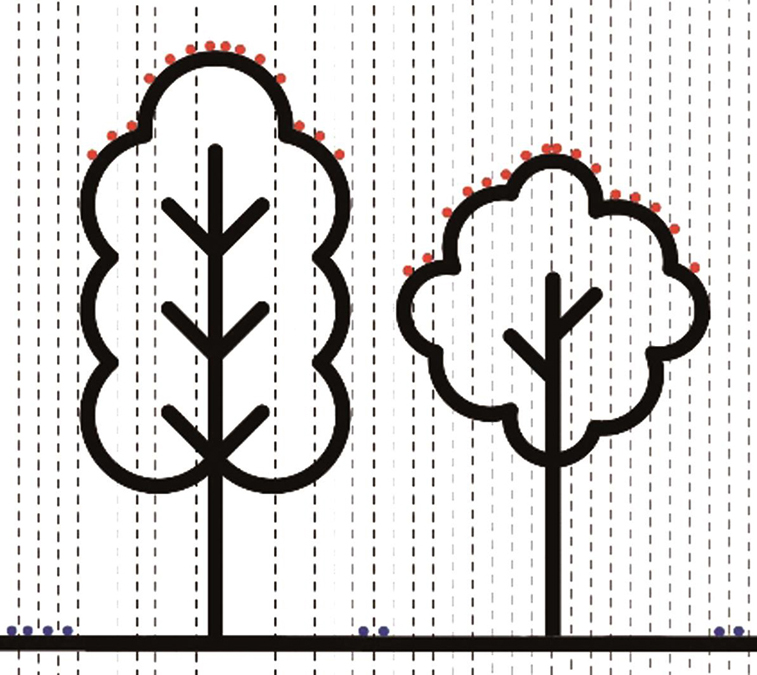
Fig. 2. Local extreme point detection
Fig. 3. Search results of local extreme points. (a) Clustering result of connectivity growth; (b) three-dimensional clustering diagram of branches and trunks; (c) clustering status of branches and trunks; (d) result of extracting tree vertices
Fig. 4. Schematics of density contour. (a) Schematic of under-segmented two-dimensional density contours; (b) schematic of under-segmented three-dimensional density contours
Fig. 5. Schematics of under-segmentation. (a) Result of low vegetation segmentation; (b) result of double tree segmentation; (c) result of three wood tree segmentation
Fig. 6. TLS point cloud data. (a) Sample 1; (b) sample 2; (c) sample 3
Fig. 7. Single tree segmentation results in this study. (a) Sample 1; (b) sample 2; (c) sample 3
Fig. 8. Segmentation results by different single tree segmentation methods
Fig. 9. Single tree extraction result of mixed woodland. (a) 3D point cloud data of mixed woodland; (b) segmentation result of proposed method
|
Table 1. Results of three single tree segmentation methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20