To cope with severe global climate change and achieve green development, China pledged at the 75th Session of the United Nations General Assembly to achieve a carbon peak by 2030 and carbon neutrality by 2060. Through photosynthesis, vegetation can effectively offset a fraction of the carbon dioxide emissions; therefore, it is of great practical significance to investigate forests and explore their carbon sink capacity to achieve carbon neutrality. However, traditional remote sensing technology is limited by the external environment and the lack of the internal structure data of forests. The emergence of LiDAR technology has made a breakthrough in forest resource surveying. Individual tree segmentation is an important component of forest resource investigation. The accuracy of the identified tree height, crown diameter, crown height, diameter at breast height (DBH), and other tree parameters is directly affected by the segmentation of single trees. However, at present, the research on single tree segmentation based on terrestrial LiDAR is still faced with the difficult problem of low precision of single tree segmentation in complex forest areas. Therefore, it is important to develop a single tree segmentation method with high precision and robustness.
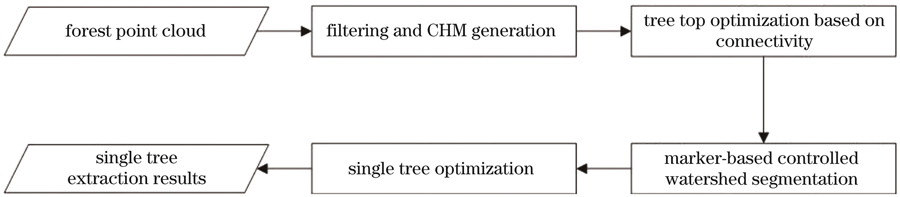
Point cloud filtering is conducted using the cloth simulation filter (CSF) to obtain the ground points. Thereby, the digital terrain model (DTM) can be generated using the ground points. By subtracting the DTM from the digital surface model (DSM) generated by the point clouds, the forest canopy height model (CHM) can be established. Then, the moving window is used to detect the local maximum and candidate treetops. When the moving window is small, many local points that are extremely high can be detected. Note that not all of these high points are treetops. To optimize treetop detection results, these high points should be processed further. In this study, connectivity growth clustering is conducted on these high points. As a result, only the highest point of each cluster is selected as the treetop. After treetop detection, the marker-controlled watershed segmentation method is applied to the CHM. Thereafter, single tree detection results can be obtained. However, some neighboring trees cannot be separated successfully by the marker-controlled watershed segmentation method. Thus, the single tree detection results should be optimized further. In this study, a method for under-segmented trees based on density isolines is proposed. In general, for a single tree, the density at the tree's center should be the largest. From the center to the canopy margin, the density decreases. Based on this characteristic, the under-segmented trees can be optimized by detecting the density isoline.
To verify the feasibility of the proposed method, three groups of terrestrial LiDAR forest point cloud data are selected for testing (Fig. 6). The three groups of data are labeled by manual classification. Three evaluation indices are used to evaluate the performances of the proposed method, including completeness, correctness, and average accuracy. In this study, the Meanshift and marker-controlled watershed segmentation algorithms are selected for comparative analysis. The average detection accuracy of the proposed method for the three groups of samples is 76.06%, 74.29%, and 50.70%, respectively (Table 1). The Meanshift method has an average detection accuracy of 37.04%, 51.8%, and 30.69% for the three groups of samples, and the marker-controlled watershed method has an average detection accuracy of 53.33%, 55.07%, and 37.93% for the three groups of samples, respectively (Table 1). The comparison shows that the average detection accuracy of the proposed method is higher than those of the Meanshift and the marker-controlled watershed segmentation methods.
In this study, connectivity growth is performed on the initial treetops, and optimization extraction of treetops is achieved by detecting the highest point of the connected region. This helps avoid the misjudgment of local maximum as tree vertices, effectively reduces the misjudgment rate of local maxima as tree vertices, and promotes the subsequent improvement of accuracy of single tree segmentation based on treetop markers. For locally under-segmented trees, this study proposes a single tree under-segmented optimization method based on density isolines, which can optimize the segmentation of under-segmented trees and improve the accuracy of single tree segmentation. Three samples of forest TLS point cloud data from different regions are used for experimentation. Experimental results show that the proposed method can achieve average detection accuracies of 76.06%, 74.29%, and 50.70%, which are better than those of the Meanshift segmentation method and traditional marker-controlled watershed segmentation methods. It can be seen that the proposed method has a certain robustness and achieves high-precision single wood segmentation for vegetation point cloud data in different regions.