
Peng Wang, Ruizhe Zhu, Changku Sun. Point Cloud Coarse Registration Algorithm with Scene Classification Based on Improved RANSAC[J]. Laser & Optoelectronics Progress, 2020, 57(4): 041510
- Laser & Optoelectronics Progress
- Vol. 57, Issue 4, 041510 (2020)
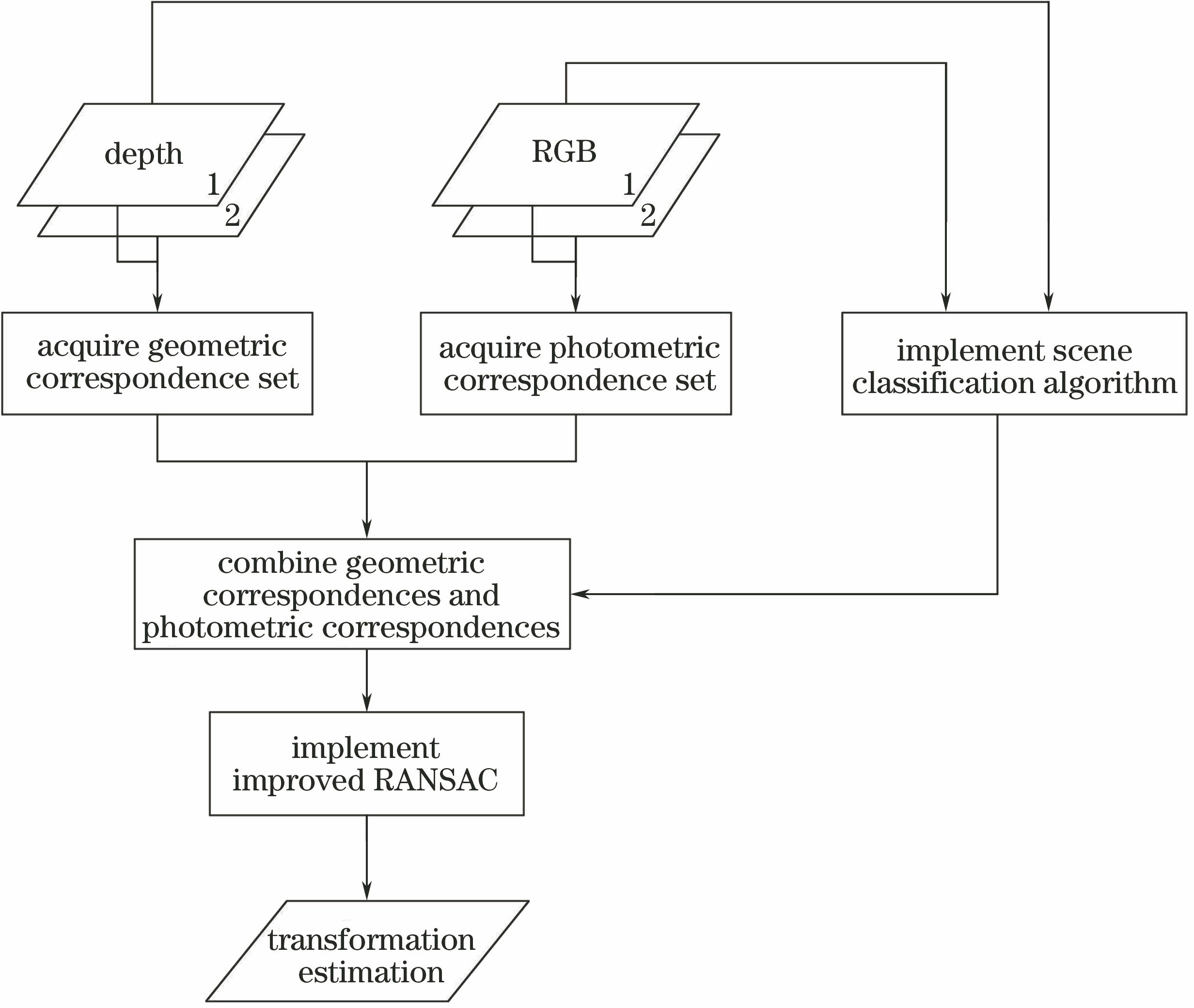
Fig. 1. Flow chart of point cloud coarse registration algorithm with scene classification
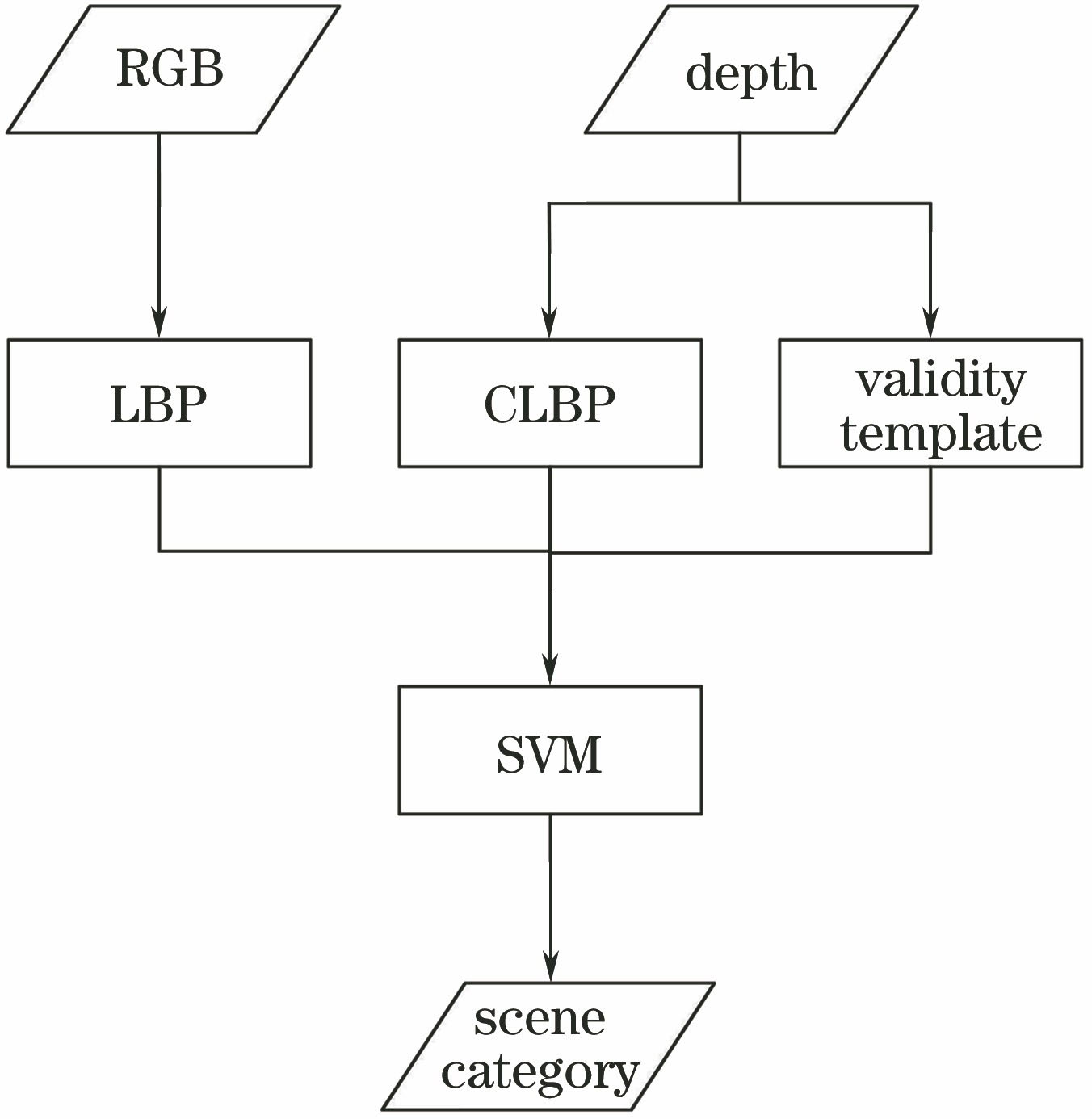
Fig. 2. Flow chart of scene classification algorithm
Fig. 3. Improved RANSAC algorithm
Fig. 4. RGB-D data from fr3_long_office_household. (a) RGB image; (b) depth image
Fig. 5. RGB-D data from fire. (a) RGB image; (b) depth image
Fig. 6. Point clouds before and after single registration. (a) Before registration; (b) after registration
Fig. 7. Point clouds before and after consecutive alignment. (a) Point clouds without alignment; (b) point clouds aligned with coarse registration; (c) point clouds aligned with fine registration; (d) point clouds aligned with truth value
Fig. 8. General registration errors for different algorithms in each experiment
Fig. 9. Number of registration failures for different algorithms in each experiment
| |||||||||||||||||||
Table 1. Confusion matrix
|
Table 2. Evaluation results of SVM
| |||||||||||||||||||||||||||||||
Table 3. General registration errors before and after registration

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20