
Yutong Dai, Zhiguo Chen, Yi Fu. Rotation-Based Scale Adaptive Moving Target Tracking Algorithm[J]. Laser & Optoelectronics Progress, 2021, 58(12): 1210019
- Laser & Optoelectronics Progress
- Vol. 58, Issue 12, 1210019 (2021)
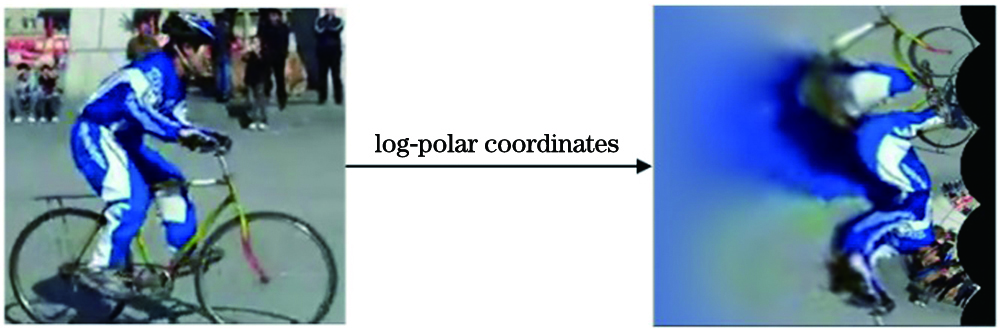
Fig. 1. Schematic diagram of log-polar coordinates
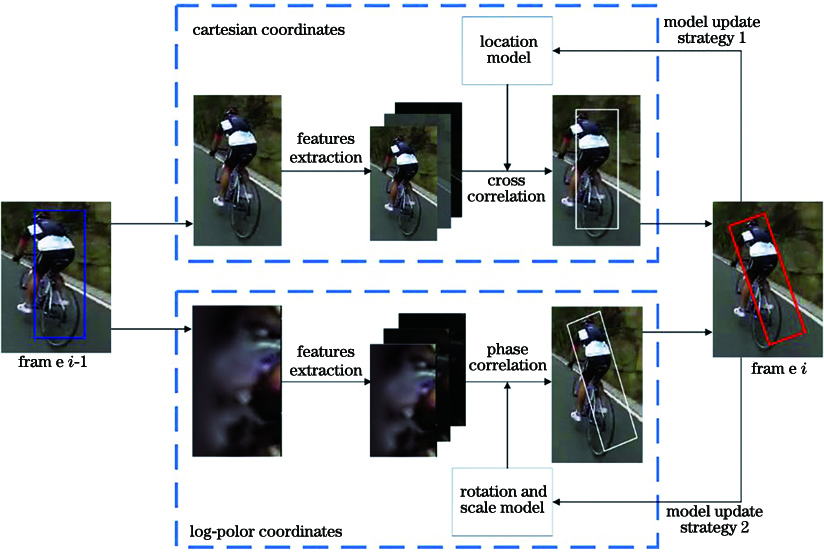
Fig. 2. Flow chart of improved algorithm
Fig. 3. Evaluation results of OTB-50. (a) Precision plot; (b) success rate plot
Fig. 4. Partial tracking effect. (a) Bike_ce2 #100-#400-#800; (b) Bikeshow_ce #100-#200-#350; (c) Boat_ce1 #100-#200-#300; (d) Gym #200-#400-#600; (e) Dancer #100-#150-#180; (f) Singer2 #100-#200-#300
Fig. 5. DP of different algorithms for partial videos. (a) Bikeshow_ce; (b) Boat_ce1; (c) Car2; (d) CarScale; (e) Dancer; (f) Singer2
Fig. 6. Center location error of different algorithms on partial videos. (a) Bikeshow_ce; (b) Boat_ce1; (c) Car2; (d) CarScale; (e) Dancer; (f) Singer2
Fig. 7. Mean value plots. (a) CLE; (b) OP; (c) DP
|
Table 1. Test videos in experiment
|
Table 2. Running speed of algorithms on OTB-50
|
Table 3. Comparison of DP, CLE, OP, and FPS

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20