
Bo Wang, Dengfeng Dong, Xinghua Gao, Weihu Zhou. Laser tracker target tracking recovery method based on detection system with active infrared vision[J]. Infrared and Laser Engineering, 2021, 50(4): 20200254
- Infrared and Laser Engineering
- Vol. 50, Issue 4, 20200254 (2021)
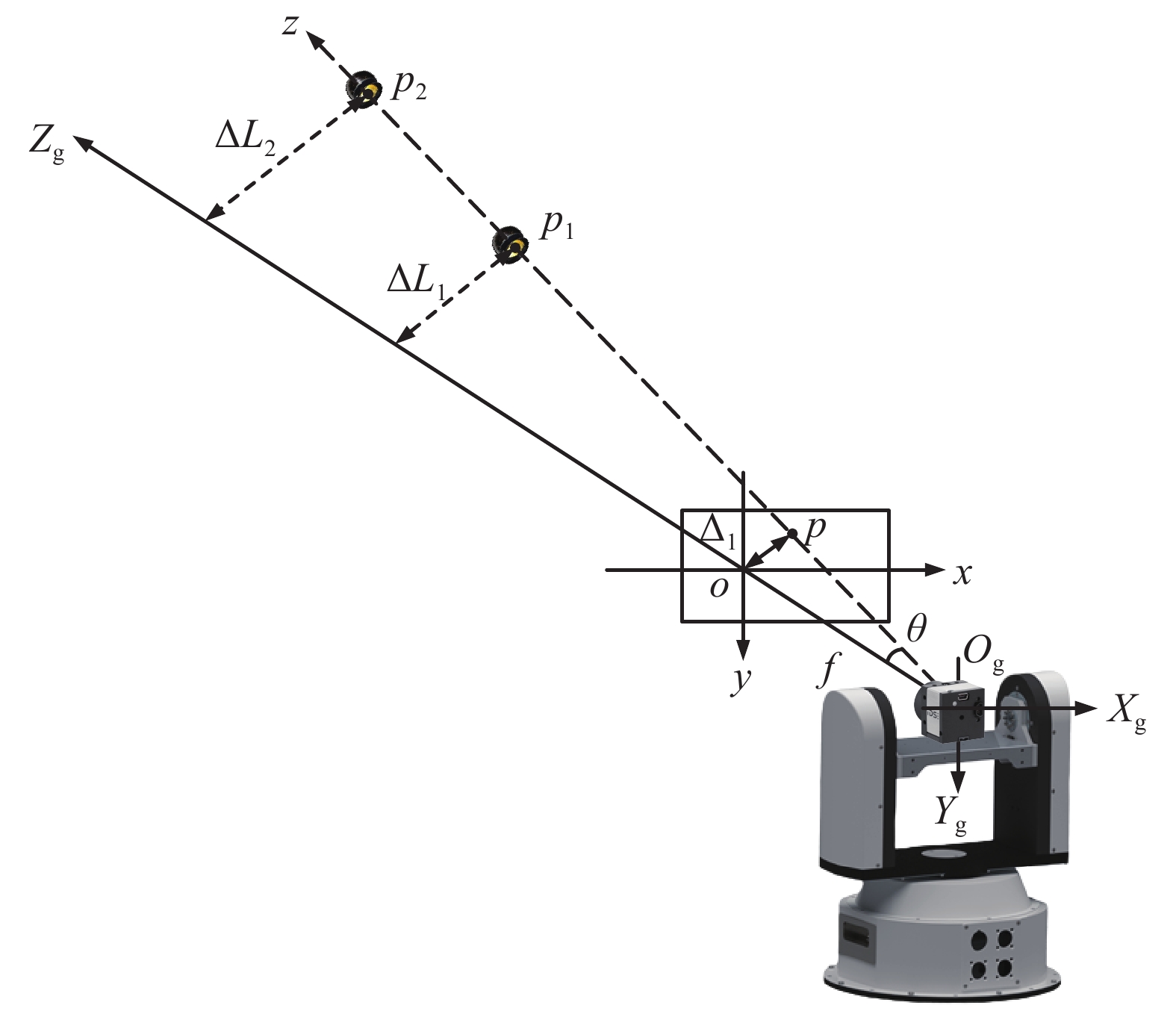
Fig. 1. Schematic diagram of tracking recovery
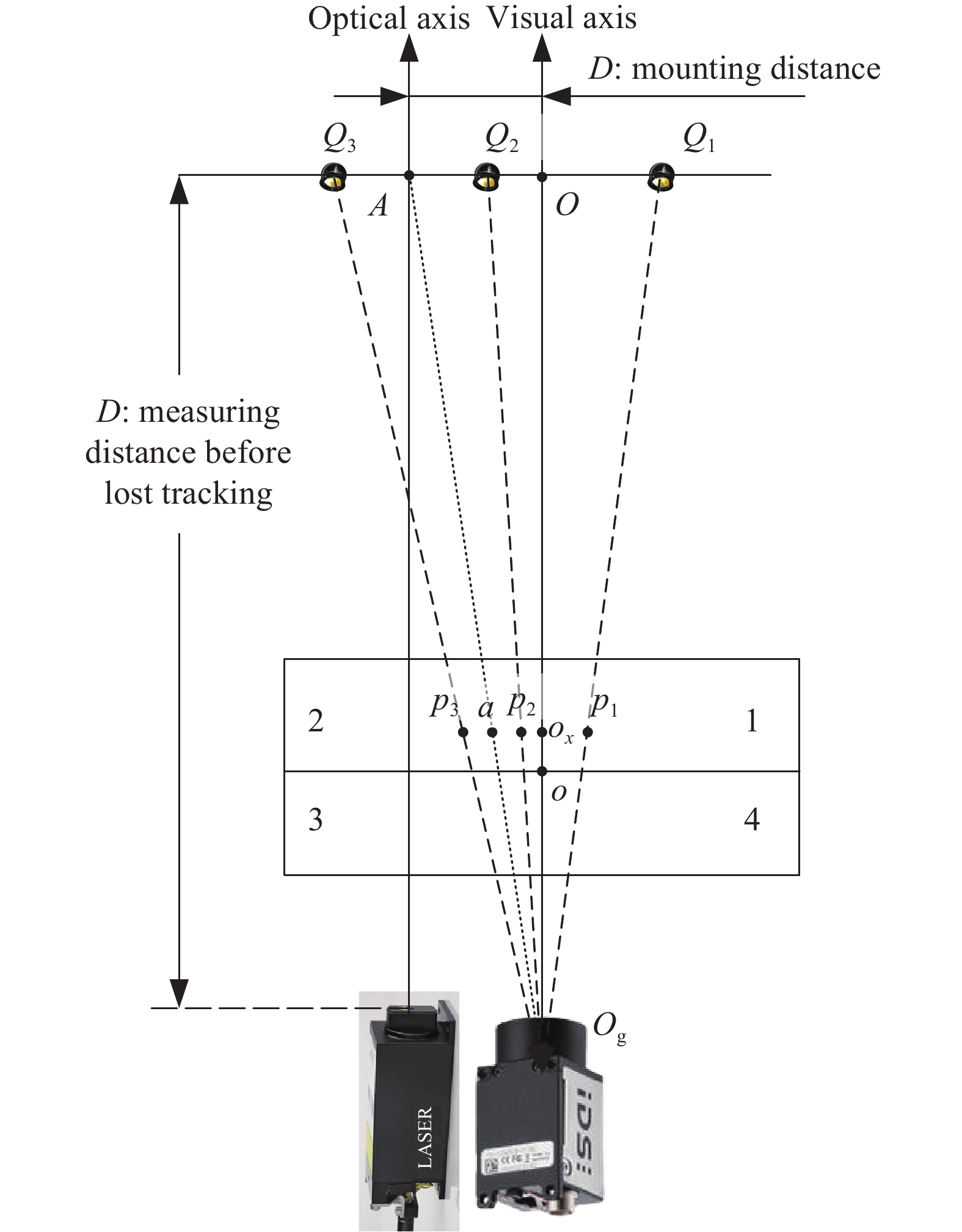
Fig. 2. Non-coaxially assembled system
Fig. 3. System schematic diagram
Fig. 4. Infrared image
Fig. 5. Object recognition and localization
Fig. 6. Flowchart of tracking recovery algorithm
Fig. 7. Test images
Fig. 8. Experimental facility of tracking recovery
| |||||||||||||||
Table 1. [in Chinese]
| |||||||||||||||||||||||||||||||||||
Table 2. [in Chinese]

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20