
Yaodeng Liu, Lü Yaowen, Bojun Du, Xuanrui Gong, Xi Huang. Projection Center and Triple Difference Detection Method of T-Type Photoelectric Theodolite[J]. Acta Optica Sinica, 2024, 44(2): 0212003
- Acta Optica Sinica
- Vol. 44, Issue 2, 0212003 (2024)
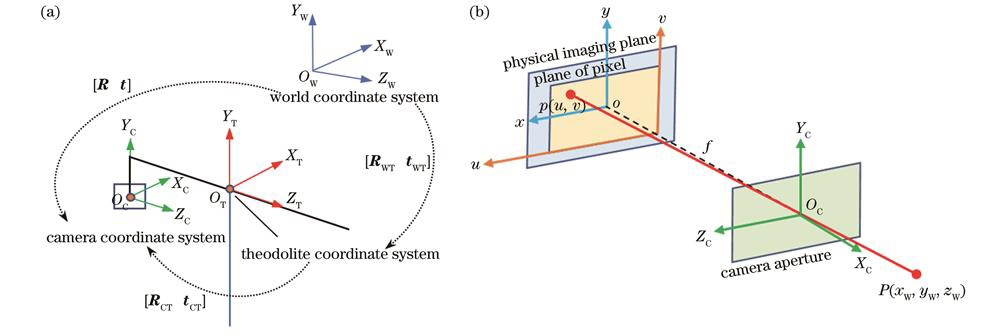
Fig. 1. Coordinate systems and imaging model. (a) Relation among three coordinate systems; (b) pinhole imaging model

Fig. 2. T-type photoelectric theodolite imaging model. (a) Positive image; (b) inverted image
Fig. 3. T-type photoelectric theodolite for pole vertex imaging diagram. (a) Positive image; (b) reversed image
Fig. 4. Flow chart of proposed overall algorithm
Fig. 5. Performance with noise level on detection accuracy. (a) tz, ty; (b) g, h, cx, cy
Fig. 6. Performance with tx on detection accuracy. (a) tz, ty; (b) g, h, cx, cy
Fig. 7. Performance with near station pole distance on detection accuracy. (a) tz, ty; (b) g, h, cx, cy
Fig. 8. Picture of T-type photoelectric theodolite
Fig. 9. Captured images of station poles. (a) Near station pole under positive image; (b) near station pole under reversed image; (c) far station pole under positive image; (d) far station pole under reversed image
Fig. 10. Reprojection error distribution. (a) Before optimization; (b) after optimization
|
Table 1. Comparison of linear calculation values and optimized values

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20