
Yunhui Li, Ju Huo, Ming Yang. Research on posture estimation method of small-size vehicle in the ground test based on the graph optimal model[J]. Infrared and Laser Engineering, 2020, 49(4): 0413003
- Infrared and Laser Engineering
- Vol. 49, Issue 4, 0413003 (2020)
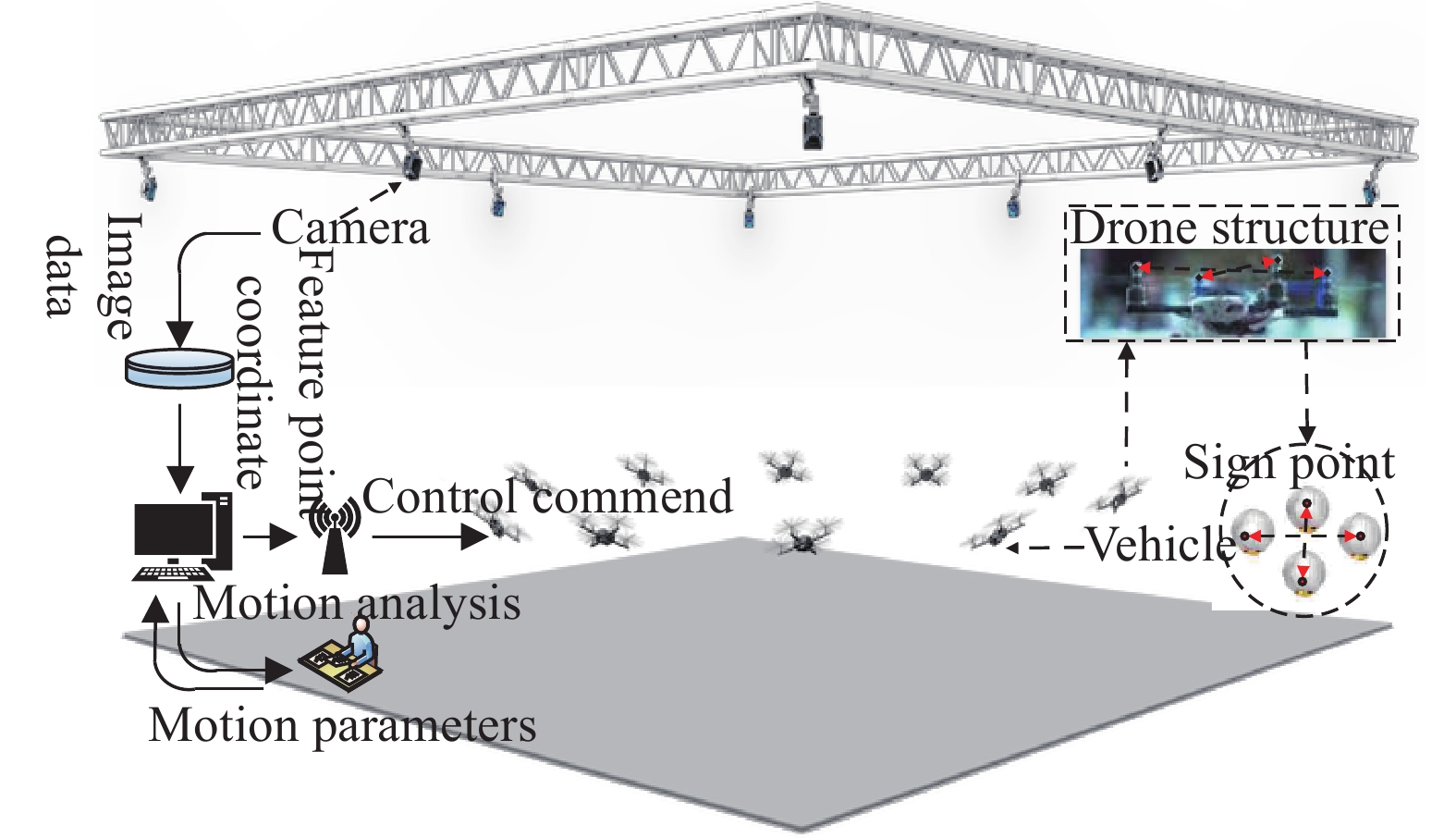
Fig. 1. Block diagram of vision position system of drones
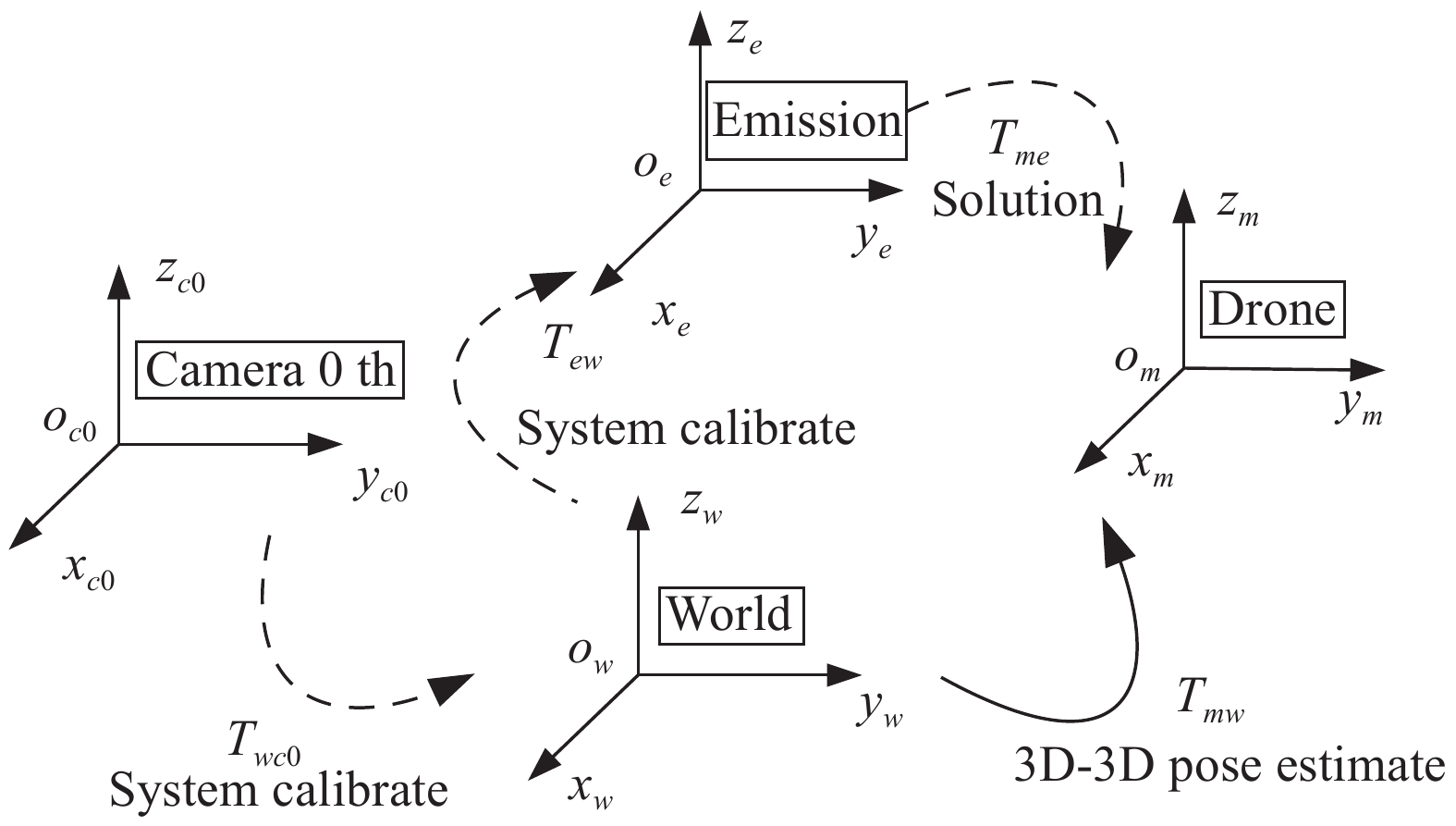
Fig. 2. Transform relationship of the frame between vehicle and vision positioning system in the ground test
Fig. 3. Setup of sign point in the vehicle
Fig. 4. Accumulated schematic diagram of vehicle positioning error
Fig. 5. Graph optimal model of vehicle pose estimation with a circle trajectory motion
Fig. 6. Error statistical of linear posture estimation algorithm
Fig. 7. Error statistical of nonlinear optimal posture estimation algorithm
Fig. 8. Mean error distribution of relative 3D localization error of estimation algorithm before and after nonlinear optimization
Fig. 9. Actual posture estimation accuracy verification experimental device
Fig. 10. Result of pose estimate based on linear algorithm
Fig. 11. Result of pose estimate based on nonlinear algorithm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20