
Wei Song, Xinyu Wei, Minghua Zhang, Qi He. Stereo Matching Based on Improved Cost Calculation and a Disparity Candidate Strategy[J]. Laser & Optoelectronics Progress, 2021, 58(2): 0215001
- Laser & Optoelectronics Progress
- Vol. 58, Issue 2, 0215001 (2021)
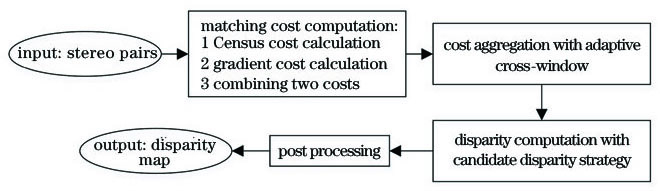
Fig. 1. Algorithm flow
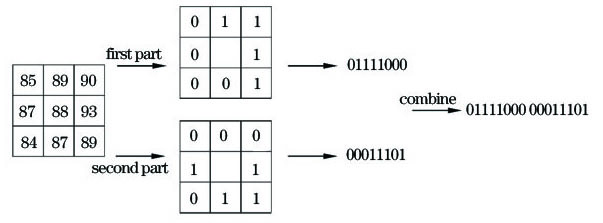
Fig. 2. Coding process of L-Census
Fig. 3. Failure diagram in the boundary area of the object, in which the correct matching point of p is q, but the corresponding mismatching point is e obtained by Eq. (3). (a) Part of left image of Teddy; (b) part of right image of Teddy
Fig. 4. Illustration of the effectiveness of the adaptive weighted combining strategy of bidirectional gradient cost
Fig. 5. Disparity maps obtained by different horizontal and vertical gradient costs combining methods. (a) Original image; (b) real disparity map; (c) disparity map obtained using Eq. (3); (d) disparity map obtained using ABiGrad
Fig. 6. Construction of adaptive cross window. (a) Cross arm; (b) adaptive support area
Fig. 7. Area to verify the "candidate disparities" idea
Fig. 8. Flow chart of disparity calculation
Fig. 9. Pseudo code for disparity calculation
Fig. 10. Effect of parameters changing on error rate. (a) Variation of error rate with λGrad; (b) variation of error rate with λCensus; (c) variation of error rate with M; (d) variation of error rate with τc; (e) variation of error rate with τd
Fig. 11. Disparity maps obtained by different cost calculation methods. (a) Reference image; (b) real disparity map; (c) AD-Cen; (d) AD-Grad; (e) LCen-ABiGrad
Fig. 12. Advantages of DC over WTA in the repeated texture area (straight frame), weak texture area (dotted frame) and untextured area (double straight frame). (a) Reference image; (b) disparity map obtained by WTA; (c) disparity map obtained by DC; (d) marked disparity map
Fig. 13. Results of our algorithm on standard stereo image pairs. (a) Reference image; (b) real disparity map; (c) disparity map generated by our algorithm; (d) mismatching map
|
Table 1. Correct rate of each candidate disparity unit: %
|
Table 2. Experimental parameter setting
|
Table 3. Mismatching rate of different cost calculation methods unit: %
|
Table 4. Mismatching rate of different disparity calculation strategies unit: %
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 5. Mismatch rate of different algorithms on standard stereo picture pairs unit: %
|
Table 6. Running time of different algorithms on standard stereo image pairs unit: s

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20