
Hongnan Zhao, Wensong Jiang, Li Yang, Zai Luo, Hongyang Li. Correction method for edge deviation of line laser sensor[J]. Infrared and Laser Engineering, 2022, 51(4): 20210317
- Infrared and Laser Engineering
- Vol. 51, Issue 4, 20210317 (2022)
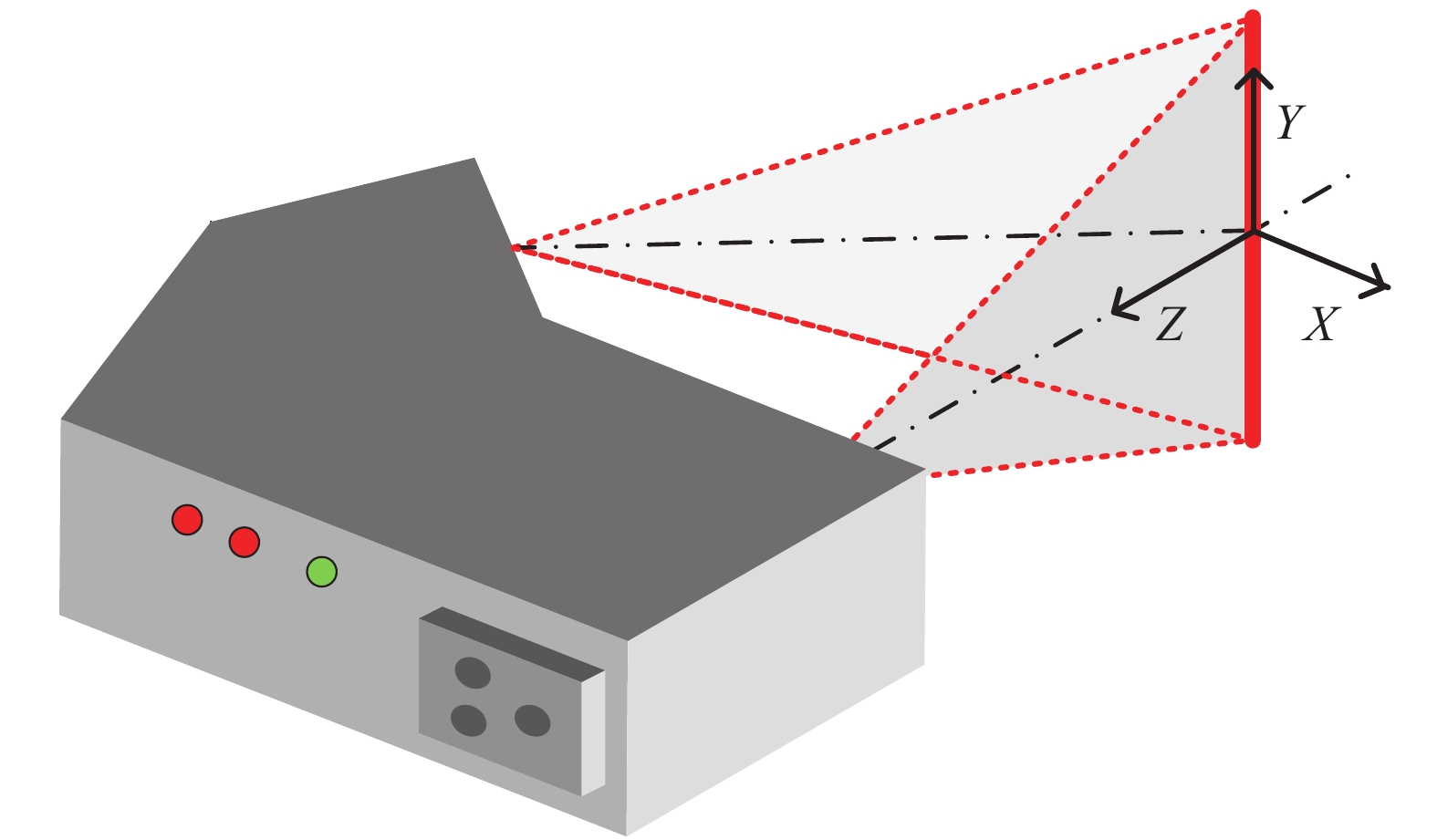
Fig. 1. Schematic diagram of line laser sensor
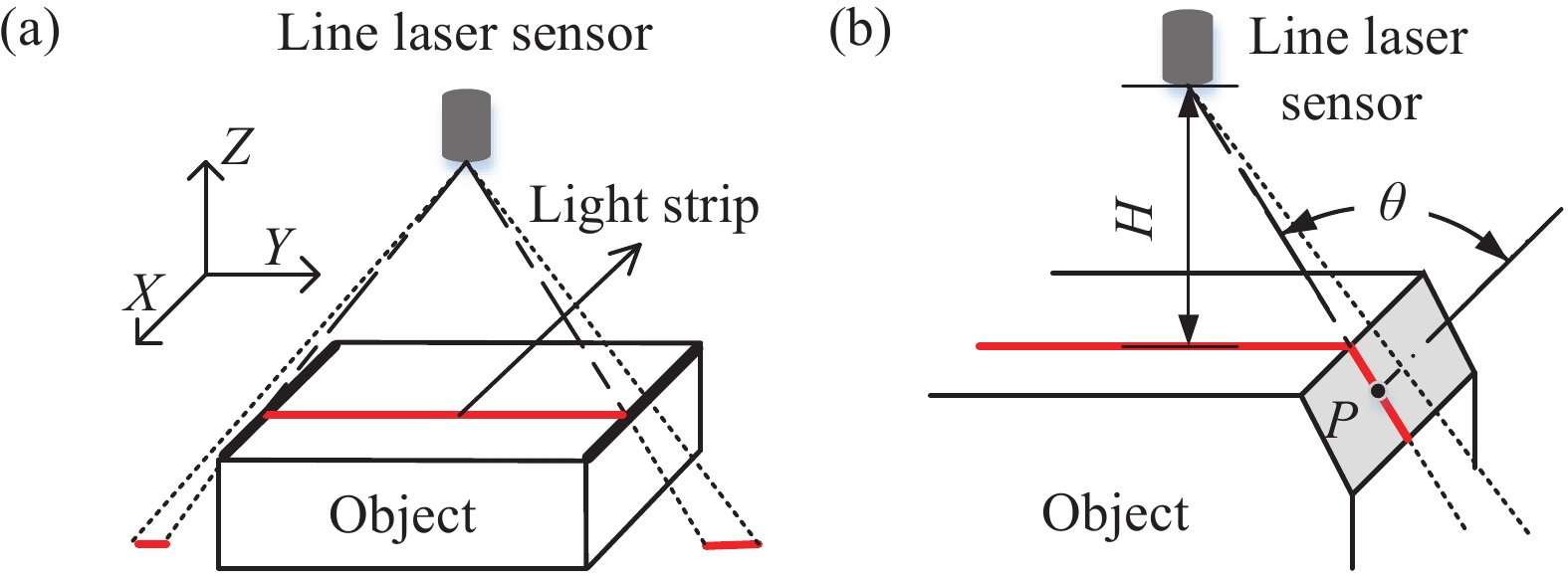
Fig. 2. (a) Line laser contour scanning;(b) Edge enlargement
Fig. 3. Image processing error
Fig. 4. (a) Vertical side noise;(b) Edge enlargement
Fig. 5. Filtering process of vertical side noise
Fig. 6. Illustration of interpolation compensation
Fig. 7. (a) Experiment platform; (b) Scanned object
Fig. 8. (a) Noise removal effect;(b) Edge enlargement
Fig. 9. Design of dimensional measurement scheme
Fig. 10. (a) First sampling; (b) M th sample
Fig. 11. (a) Dimension measurement of 20 mm gauge block; (b) Dimen-sion measurement of 40 mm gauge block; (c) Dimension measurement of 60 mm gauge block
Fig. 12. Dimension measurement error before and after compensation
|
Table 1. Parameters of equipment
| ||||||||||||||||||||||||||||||||||||||
Table 2. Dimension measurement results before and after error compensation (Unit: mm)

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20