
Chen Yong, Wu Jie, Liu Huanlin, Zheng Han. Visible Light and Inertial Navigation Fusion Indoor Positioning System Based on Hidden Markov Model[J]. Chinese Journal of Lasers, 2020, 47(12): 1206001
- Chinese Journal of Lasers
- Vol. 47, Issue 12, 1206001 (2020)
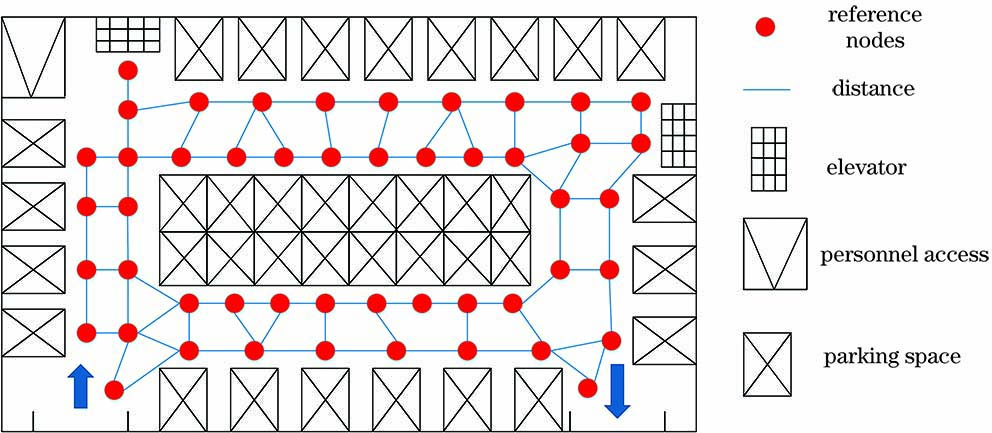
Fig. 1. Indoor positioning fingerprint map
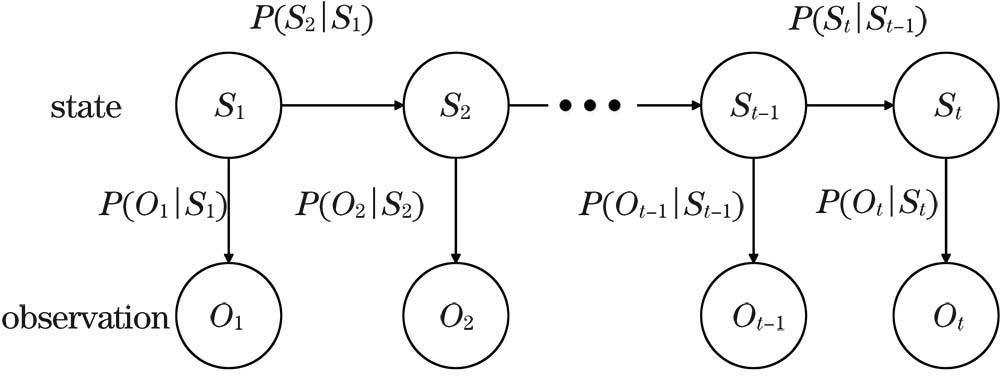
Fig. 2. Diagram of HMM
Fig. 3. Diagram of candidate set of user maximum speed limit
Fig. 4. Schematic diagrams of Viterbi algorithm based on user maximum speed. (a) Traditional Viterbi algorithm; (b) improved Viterbi algorithm
Fig. 5. Flow chart of fusion positioning algorithm
Fig. 6. Fingerprint map of indoor parking lot
Fig. 7. Experimental trajectory of indoor parking lot
Fig. 8. Cumulative error distribution function
Fig. 9. Positioning track maps of four contrast algorithms. (a) Kalman filter based VLC and PDR fusion location trajectory map; (b) visible light fingerprint positioning trajectory; (c) traditional HMM VLC positioning trajectory; (d) inertial navigation positioning trajectory
Fig. 10. CDF of positioning error of compared algorithms
Fig. 11. Location error graph corresponding to different numbers of candidate nodes
|
Table 1. Simulation parameters
|
Table 2. Positioning error statistics
|
Table 3. Positioning error statistics of compared algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20