
Chen Yong, Wu Jie, Liu Huanlin, Zheng Han. Visible Light and Inertial Navigation Fusion Indoor Positioning System Based on Hidden Markov Model[J]. Chinese Journal of Lasers, 2020, 47(12): 1206001
- Chinese Journal of Lasers
- Vol. 47, Issue 12, 1206001 (2020)
Abstract
Keywords
OCIS code 060.4510; 350.4600
1 引言
统计发现,人类超过一半的活动是在室内进行,诸如图书馆、医院、超市和地下停车场等大型室内场所,因此室内定位导航服务需求日益增多[
可见光通信(VLC)作为一种新兴的定位技术成为研究热点[
针对上述存在的问题,将隐马尔可夫模型(HMM)作为定位模型[
2 融合定位模型的建立
大型场所的定位和导航是紧密相关的,需要利用系统所建立的地图让用户清晰地知道自己的位置和想要到达的地方。为此,
式中:L为节点在真实环境的二维位置点;I为该节点的空间信息,如车位号、出入口、电梯号等;
每个参考节点之间的距离
式中:
传统的指纹定位方法的复杂度较高,且较难实现对大型场所中用户的移动定位,对此本文提出采用HMM在有效定位区域布置参考节点方式。根据HMM的原理,其定位遵循两个规律:1)任意时刻的隐藏状态只依赖于前一时刻,即每个时刻定位节点之间转移的可能性就是状态转移概率;2)任意时刻的观测状态只依赖当前时刻的隐藏状态。
![]()
Figure 1.Indoor positioning fingerprint map
![]()
Figure 2.Diagram of HMM
3 融合定位算法的设计
3.1 离线阶段的建库
在离线阶段,根据室内指纹地图建立定位模型,将定位参考节点作为隐藏状态
P1
P2
式中:
状态发射概率组成发射矩阵
P(R|Si)=
式中:
初始概率分布π就是定位开始阶段用户所处位置的概率分布,定位算法中所有节点的初始概率都选为1。
3.2 候选集的选择
在隐马尔可夫模型中进行参考节点的预测时通常采用维特比算法[
![]()
Figure 3.Diagram of candidate set of user maximum speed limit
3.3 在线定位阶段的轨迹匹配
在在线定位阶段,根据
式中:
当
式中:
在
将上述4个概率相乘,概率最大的一个节点即为
经对维特比算法进行分析,并对比
![]()
Figure 4.Schematic diagrams of Viterbi algorithm based on user maximum speed. (a) Traditional Viterbi algorithm; (b) improved Viterbi algorithm
3.4 算法流程的设计
![]()
Figure 5.Flow chart of fusion positioning algorithm
4 仿真与结果分析
4.1 仿真环境与条件
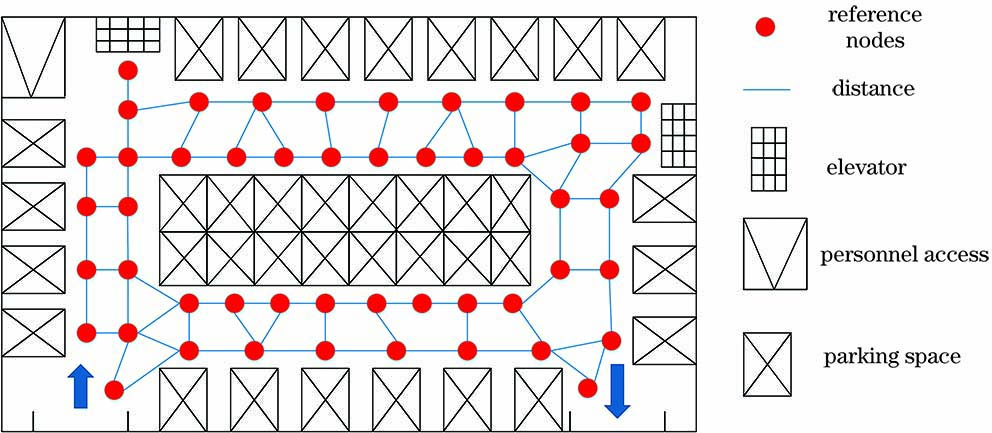
为了评估本文定位算法对大型室内场所用户移动定位的效果,对某高校内一个室内停车场进行仿真。停车场长度为100m,宽为25m,总面积约为2500m2,停车场包括3个出入口、2条车道、82个停车位、1个供电房、2个楼梯和4个电梯。
在离线建库阶段,建立HMM的参考节点(共162个节点),并测量每个节点之间的距离矩阵
![]()
Figure 6.Fingerprint map of indoor parking lot
| Symbol | Parameter | Value |
|---|---|---|
| Room size /m2 | 2500 | |
| Receiving height /m | 1 | |
| LED height /m | 4 | |
| Number of LEDs in each lamp | 26 | |
| Transmitted power of lamp /W | 5-10 | |
| Gain of optical filter | 1 | |
| Gain of optical concentrator | 1 | |
| Field-of-view /(°) | 55 | |
| Physical area of photo-detector /cm2 | 1 | |
| Number of nodes | 162 | |
| Maximum speed /(m·s-1) | 5 |
Table 1. Simulation parameters
4.2 仿真效果与分析
根据停车场内的道路情况,结合行人和车辆用户的移动速度,设置用户的最大移动速度为5m·s-1,采样频率为1Hz,每次模拟用户移动5min,总共采集30条路径轨迹,轨迹长度范围为200~700m。
![]()
Figure 7.Experimental trajectory of indoor parking lot
![]()
Figure 8.Cumulative error distribution function
| Number of | Forecast number | Accuracy of node | Maximum | Minimum | Average | Root mean |
|---|---|---|---|---|---|---|
| 10 | 3000 | 82 | 5.1 | 0.6 | 3.85 | 4.42 |
| 20 | 6000 | 85 | 5.4 | 0.3 | 3.47 | 3.95 |
| 30 | 9000 | 84 | 5.5 | 0.2 | 3.56 | 4.17 |
Table 2. Positioning error statistics
4.3 算法对比实验
为了验证本文算法的优越性,选择可见光指纹定位(VLCFM)[
![]()
Figure 9.Positioning track maps of four contrast algorithms. (a) Kalman filter based VLC and PDR fusion location trajectory map; (b) visible light fingerprint positioning trajectory; (c) traditional HMM VLC positioning trajectory; (d) inertial navigation positioning trajectory
![]()
Figure 10.CDF of positioning error of compared algorithms
| Positioning | Maximum | Minimum | Average | Root mean | Median |
|---|---|---|---|---|---|
| VLCFM[ | 7.3 | 0.10 | 4.61 | 5.10 | 4.22 |
| VLC-HMM | 7.4 | 0.30 | 5.52 | 6.13 | 5.04 |
| INPM[ | 9.6 | 0.05 | 6.62 | 7.14 | 5.56 |
| KF VLC-IN[ | 6.5 | 0.60 | 4.27 | 4.85 | 3.74 |
| Proposed method | 5.5 | 0.20 | 3.35 | 3.88 | 2.92 |
Table 3. Positioning error statistics of compared algorithms
4.4 用户最大速度下候选集的确定
根据3.2节所提方法,以
![]()
Figure 11.Location error graph corresponding to different numbers of candidate nodes
5 结论
选取隐马尔可夫模型作为定位模型,设计可见光与惯导融合定位算法。在离线阶段建立室内停车场指纹图,采集可见光信号和运动信息。在在线定位阶段,根据用户的最大移动速度减少候选集数量,从而提高定位速度;设计改进的维特比算法用于预测用户的运动轨迹。仿真结果表明,所提算法能准确连续地预测用户运动轨迹,并且其定位复杂度较低。与其他几种定位算法相比,所提算法在大型室内场所的移动定位误差更低,为大型室内场所的定位与导航提供参考。
References
[2] Zhou M, Liu Y Y, Wang Y et al. Anonymous crowdsourcing-based WLAN indoor localization[J]. Digital Communications and Networks, 5, 226-236(2019).
[3] Jia B, Huang B Q, Gao H P et al. Selecting critical WiFi APs for indoor localization based on a theoretical error analysis[J]. IEEE Access, 7, 36312-36321(2019).
[4] Zhang J, Wang H. An improved SNR uniformity optimization scheme for VLC system[J]. Journal of Chongqing University of Posts and Telecommunications (Natural Science Edition), 27, 78-82(2015).
[5] Khan L U. Visible light communication: applications, architecture, standardization and research challenges[J]. Digital Communications and Networks, 3, 78-88(2017).
[6] Liu H Y, Ma J H, Huang Q. Construction method of fingerprint database based on improved Kriging interpolation for indoor location[J]. Journal of Chongqing University of Posts and Telecommunications (Natural Science Edition), 29, 751-757(2017).
[10] Liu C Y. Indoor localization method based on pedestrian dead reckoning aided by multi-source fusion[J]. Journal of Chinese Inertial Technology, 24, 208-214(2016).
[11] Li X C, Wang H. Fingerprint location using sparse fingerprint acquisition and improved WKNN[J]. Journal of Chongqing University of Posts and Telecommunications (Natural Science Edition), 31, 451-459(2019).
[12] Li X C, Feng L H, Yang A Y. Fusion based on visible light positioning and inertial navigation using extended Kalman filters[J]. Sensors, 17, 1093-1099(2017).
[15] Liu C X, Lu G Q, Tang H B et al. Adaptive deployment method for virtualized network function based on viterbi algorithm[J]. Journal of Electronics & Information Technology, 38, 2922-2930(2016).


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20