
Yan Wang, Feng Yuan, Hong Jiang, Wei Chen. High Precision Pose Calculation of Space Target Based on Three Linear Array CCD[J]. Acta Optica Sinica, 2018, 38(5): 0515004
- Acta Optica Sinica
- Vol. 38, Issue 5, 0515004 (2018)
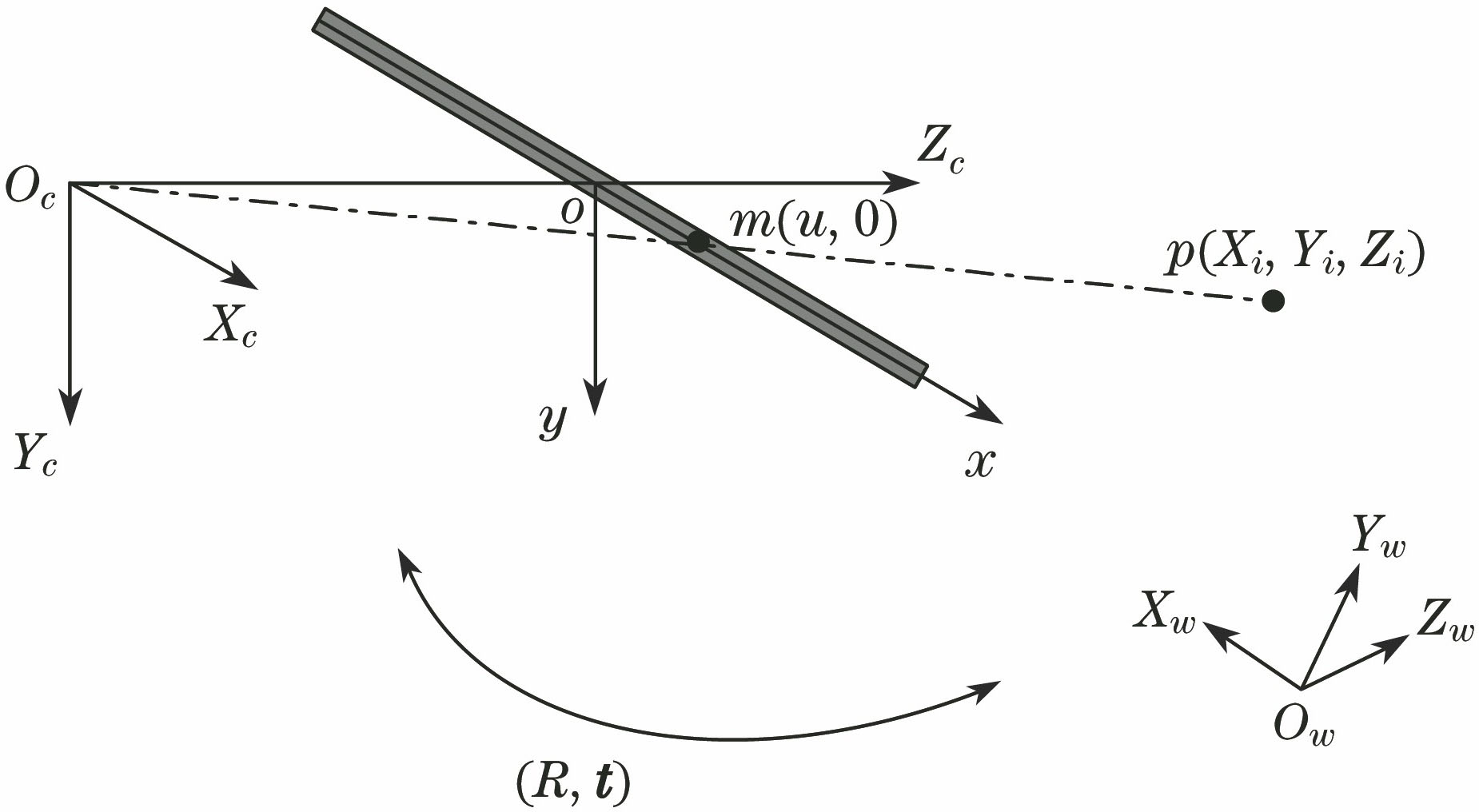
Fig. 1. Imaging model of linear CCD
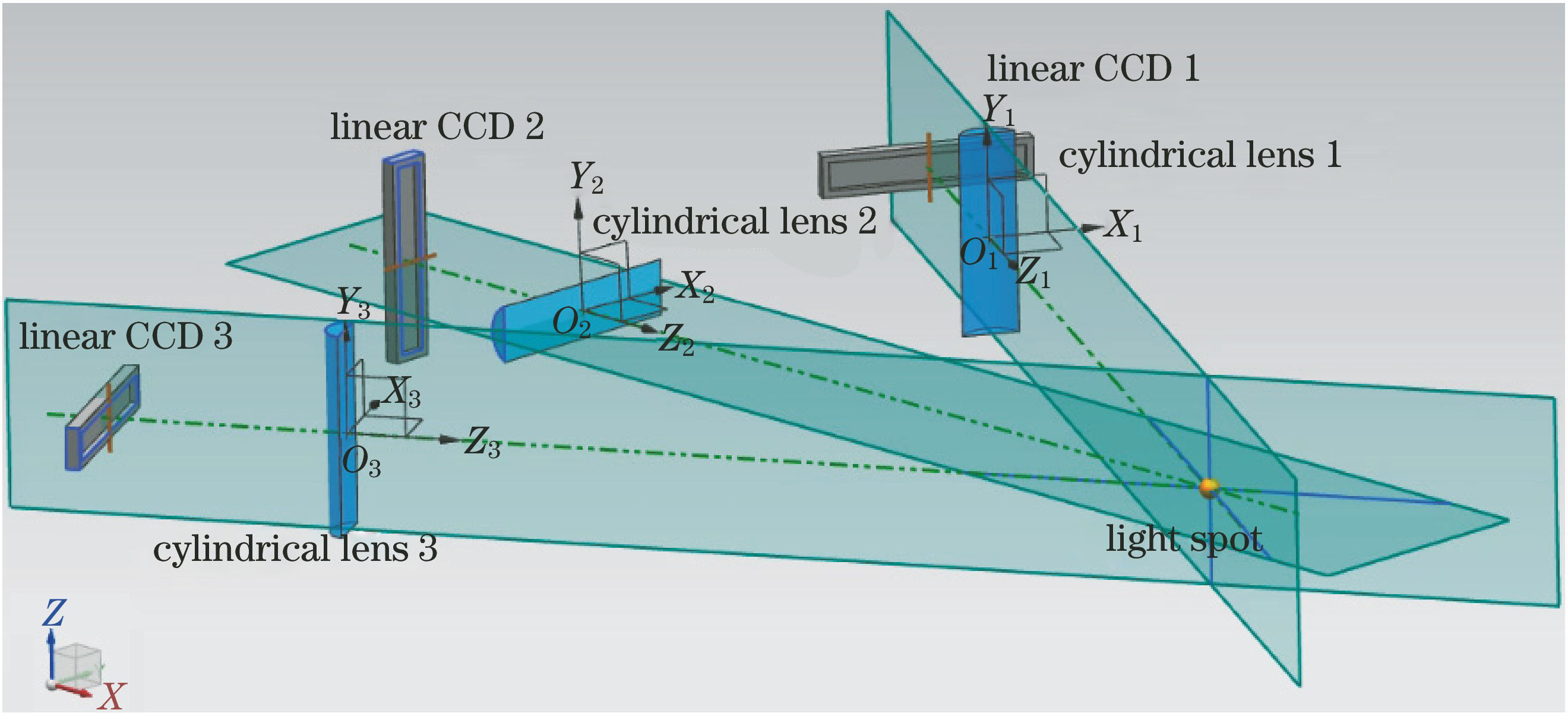
Fig. 2. Pose measurement system of linear CCD
Fig. 3. Collinear principle of object space
Fig. 4. (a) Comparison of computational efficiency of two algorithms; (b) comparison of iterative step of two algorithms with 24 feature points
Fig. 5. Estimation error of pose at different noise levels. (a) Rotation error; (b) translation error
Fig. 6. Estimation error of pose at different measurement distances. (a) Rotation error; (b) translation error
Fig. 7. Three-dimensional positioning error of (a) proposed algorithm and (b) OI algorithm
Fig. 8. Measurement experiment
Fig. 9. Error of attitude and position. (a) Angle error; (b) position error
|
Table 1. Camera intrinsic parameters calibrated by Tsai’s calibration algorithm
|
Table 2. Extrinsic parameters of camera
|
Table 3. Error analysis

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20