
Ming Lai, Jiankang Zhao, Chuanqi Liu, Chao Cui, Haihui Long. Semantic Segmentation of LiDAR Point Cloud Based on CAFF-PointNet[J]. Laser & Optoelectronics Progress, 2021, 58(20): 2028004
- Laser & Optoelectronics Progress
- Vol. 58, Issue 20, 2028004 (2021)
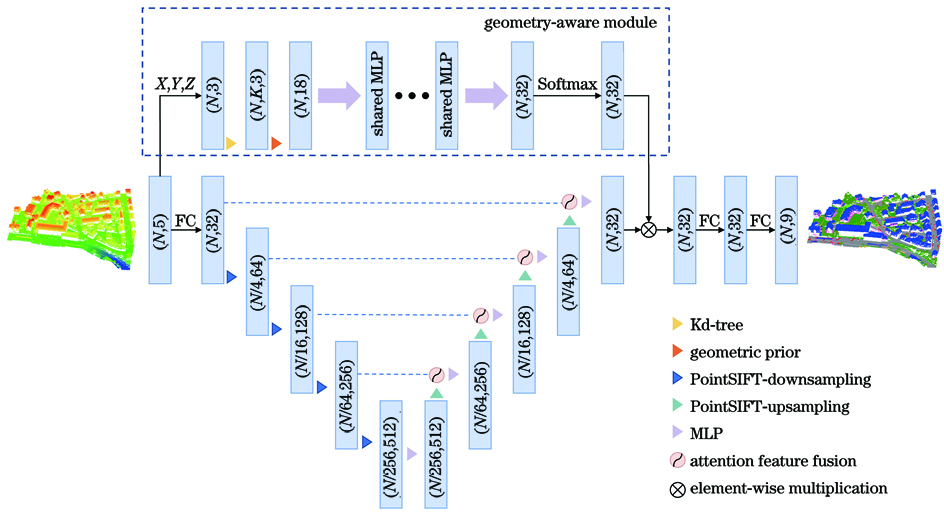
Fig. 1. Overall framework of the model
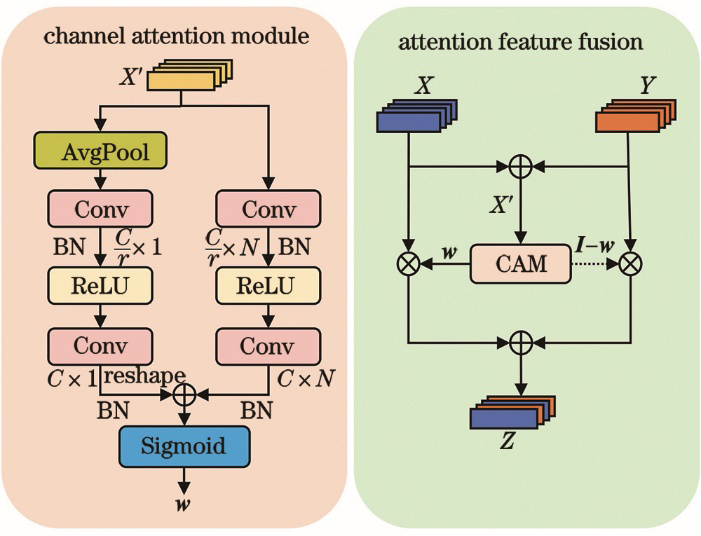
Fig. 2. Feature fusion module based on attention mechanism
Fig. 3. Training and test sets (colored by height). (a) Training set; (b) test set
Fig. 4. Loss function graph of training set and average accuracy graph of test set
Fig. 5. Comparison of classification results between our model and ground truth. (a) Ground truth; (b) ours
Fig. 6. Classification results of baseline and our model. (a) Ground truth ; (b) baseline; (c) ours
Fig. 7. Comparison of classification results of different models. (a) Ground truth; (b) ours; (c) NANJ2; (d) RIT_1; (e) WhuY4
|
Table 1. Calculation formulae for geometric features
|
Table 2. The number of points in each category for the training and test sets
|
Table 3. Confusion matrix of testing set classification results
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 4. Ablation experimental results of different models%
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 5. Quantitative comparison between our model and other models%

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20