
Joshua Lamstein, Anna Bezryadina, Daryl Preece, Joseph C. Chen, Zhigang Chen, "Optical tug-of-war tweezers: shaping light for dynamic control of bacterial cells (Invited Paper)," Chin. Opt. Lett. 15, 030010 (2017)
- Chinese Optics Letters
- Vol. 15, Issue 3, 030010 (2017)
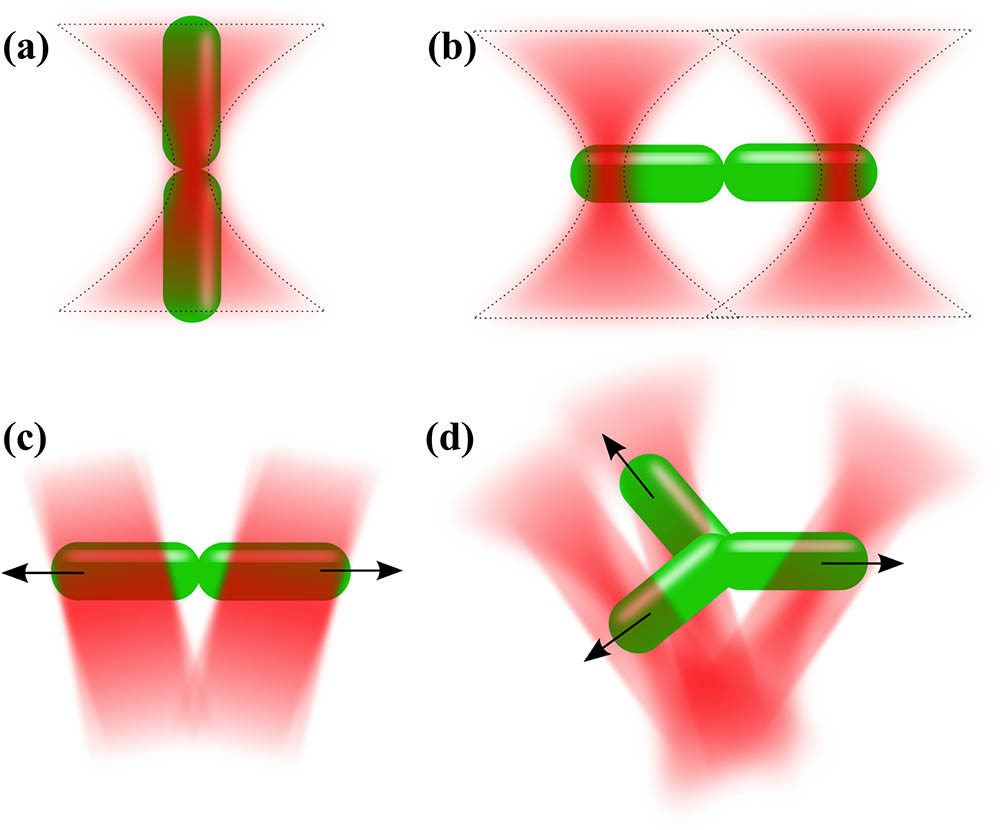
Fig. 1. Different designs of optical tweezers. (a) Single-beam optical tweezers align an elongated object along the beam axis. (b) Dual-beam optical tweezers hold an object from each end. (c) TOW optical tweezers trap an object at each end and pull the ends in opposite directions. (d) Triangular TOW tweezers with threefold rotational symmetry allow trapping and stretching of an irregularly shaped object.
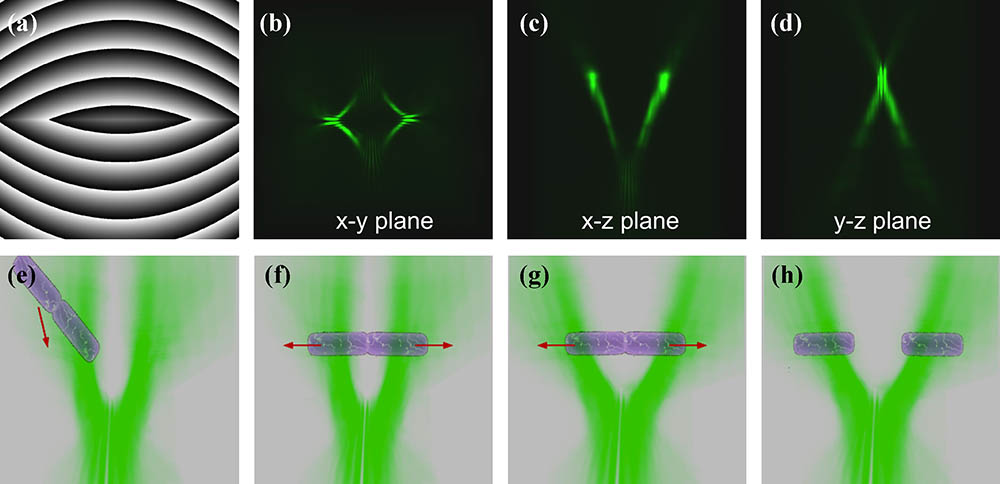
Fig. 2. Dual TOW beam: (a) a hologram, (b–d) projections of a volumetric rendering of the dual TOW beam from experimental data onto different planes near the focus of an objective lens, as the beam propagates in the z
Fig. 3. Optical trapping and manipulation of rod-shaped objects with dual TOW tweezers. (a–d) Snapshots from a video (Media 2) showing a silica rod being trapped and rotated. (e–h) Translation and rotation of a 5-μm B. thuringiensis bacterium (Media 3). (i–j) Manipulation of a 2 μm E. coli bacterium. (k–l) Rotation of an 18 μm long B. thuringiensis bacterium. (m–p) Stretching and breaking apart a cluster of S. meliloti cells. Scale bar: 3 μm.
Fig. 4. (a–b) Simulation of (a) a hologram and (b) the amplitude in focus of a triangular TOW beam without a parabolic trajectory. (c) The experimental profile of the triangular TOW beam corresponding to (b). (d–f) Corresponding results for a triangular TOW beam with a parabolic trajectory. (g) Volumetric image of the triangular TOW beam calculated via the beam propagation method (Media 4).
Fig. 5. Optical trapping and manipulation of objects with triangular TOW tweezers. (a–c) Trapping, rotating, and translating 3 μm polystyrene beads (Media 5). (d–f) Trapping and rotating a mutant multipronged S. meliloti bacterial cell. Scale bar: 5 μm.


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20