
Xingsheng Liu, Anhu Li, Zhaojun Deng, Hao Chen. Advances in Three-Dimensional Imaging Technologies Based on Single-Camera Stereo Vision[J]. Laser & Optoelectronics Progress, 2022, 59(14): 1415007
- Laser & Optoelectronics Progress
- Vol. 59, Issue 14, 1415007 (2022)
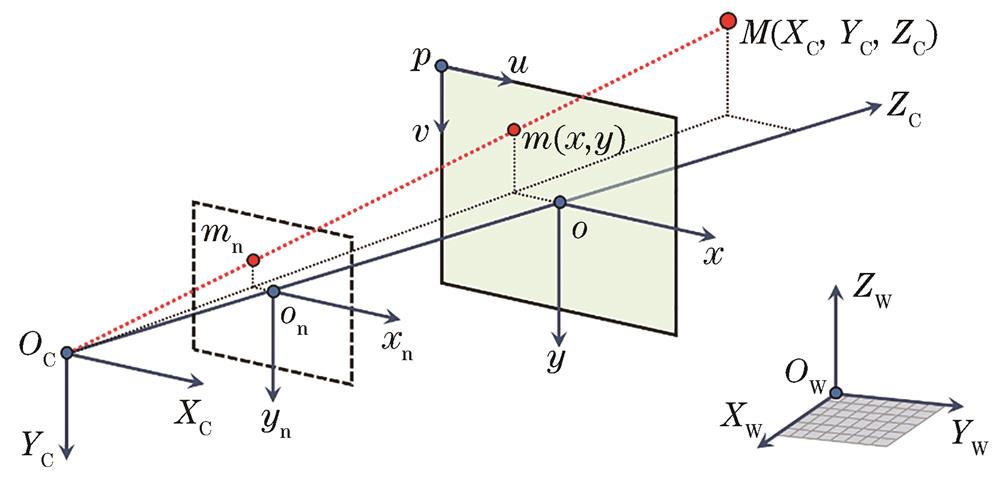
Fig. 1. Camera model with definition of coordinate systems
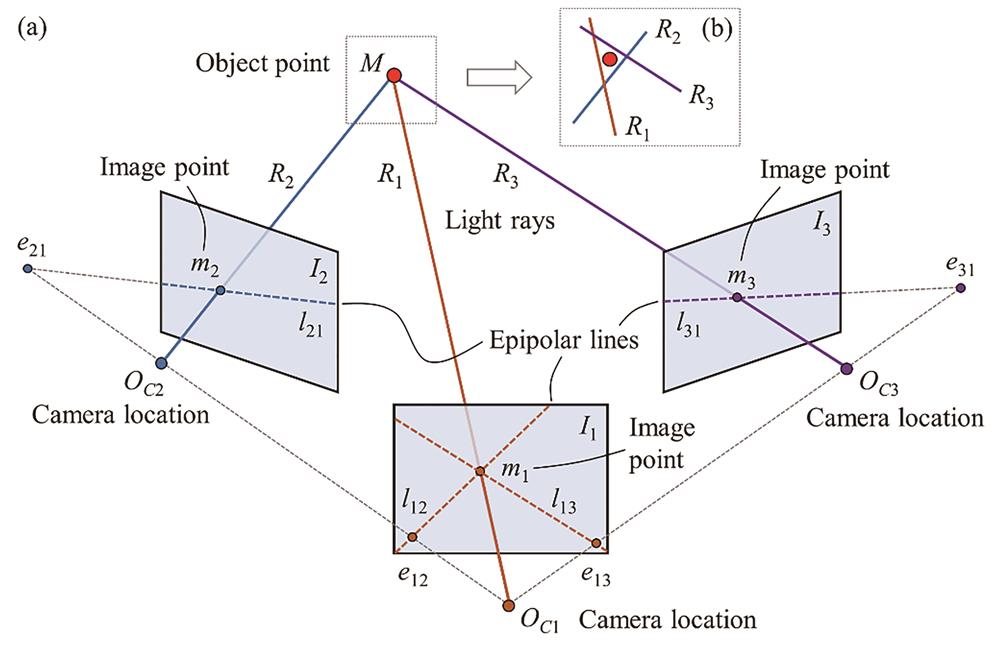
Fig. 2. Multiview geometry model. (a) Multiview imaging with stereo correspondences; (b) space resection among backward projection rays
Fig. 3. Structure from motion problem [29]
Fig. 4. Integral photography proposed by Lippmann[17]. (a) Basic imaging principle; (b) light field sampling mode
Fig. 5. 3D integral imaging based on axially distributed sensing [53]. (a) Pickup strategy for elemental images; (b) reconstructed images at different depths
Fig. 6. 3D integral imaging based on off-axially distributed sensing[56]. (a) Pickup strategy for elemental images; (b) two elemental images with object occlusion and 3D reconstructed slice images
Fig. 7. 3D integral imaging based on planar camera motion[59]. (a) Pickup strategy for elemental images; (b) reconstructed image for “car” object; (c) reconstructed image for “signal” object
Fig. 8. 3D imaging system structure with a set of planar mirrors. (a) One mirror [62]; (b) two mirrors [64]; (c) three mirrors [66]; (d) four mirrors [68]
Fig. 9. 3D profile and deformation measurement method combining four-mirror-based 3D imaging system with digital image correlation technique [72]
Fig. 10. Dynamic 3D imaging method combining four-mirror catadioptric system with a pan-tilt mirror [74]. (a) Optical arrangement; (b) 3D tracking and imaging for a dynamic object
Fig. 11. 3D imaging methods using curved mirrors. (a)-(c) System with two oppositely configured hyperboloidal mirrors, panoramic image captured by system, and 3D reconstruction results[77]; (d)-(e) system with an array of spherical mirrors, and 3D reconstructed images[79]
Fig. 12. 3D stereo imaging technique using a biprism. (a)-(c) 3D measurement principle based on modified virtual point model, system structure and measurement error map [82]; (d)-(f) 3D reconstruction principle based on perspective projection model, system structure and reconstructed object [83]
Fig. 13. Stereo endoscopic imaging method using microprism arrays[89]. (a) System setup; (b) 3D imaging model; (c) prototype of microprism array and system; (d) reconstructed depth maps for an object at different distances
Fig. 14. 3D imaging with an optically transparent plate. (a)-(c) System setup, depth estimation maps, and 3D reconstructed images[92]; (c)-(f) system setup with a MEMS-driven plate, rectified image, and depth map[93]
Fig. 15. 3D imaging using a rotational wedge prism[95]. (a) System structure; (b) imaging model; (c) multiview stereo image matching; (d) 3D profile reconstruction; (e) 3D scale reconstruction
Fig. 16. 3D information acquisition based on diffraction grating. (a) 3D digital image correlation measurement system for 3D displacement reconstruction [100]; (b) 3D diffraction-assisted fluorescent microscopy for 3D displacement reconstruction [101]
Fig. 17. 3D integral imaging using a diffraction grating[106]. (a) Diffraction-grating-based image capture and computational reconstruction under multi-wavelength laser illumination; (b) 3D reconstructed images from parallax image arrays obtained with different wavelengths
Fig. 18. Calibration of 3D imaging system using planar mirrors[109]. (a) Respective calibration for two virtual cameras; (b) direct calibration for system parameters.
Fig. 19. Calibration of 3D imaging system using a conic mirror[111]. (a) Conic mirror structure with multiple control points on mirror base; (b) a calibration image with control points captured by system
Fig. 20. Model-free distortion correction method for biprism-based 3D imaging system[112]
Fig. 21. Calibration method for rotational-prism-based variable-boresight 3D imaging system[116]
|
Table 1. Comparison of 3D imaging methods using various additional optical elements


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20