
Jingjing Guo, Xiaoyan Fei, Peng Ge, Anran Zhou, Lei Wang, Zhengqi Li, Lei Sheng. High-resolution three-dimensional imaging based on all-fiber photon-counting Lidar system[J]. Infrared and Laser Engineering, 2021, 50(7): 20210162
- Infrared and Laser Engineering
- Vol. 50, Issue 7, 20210162 (2021)
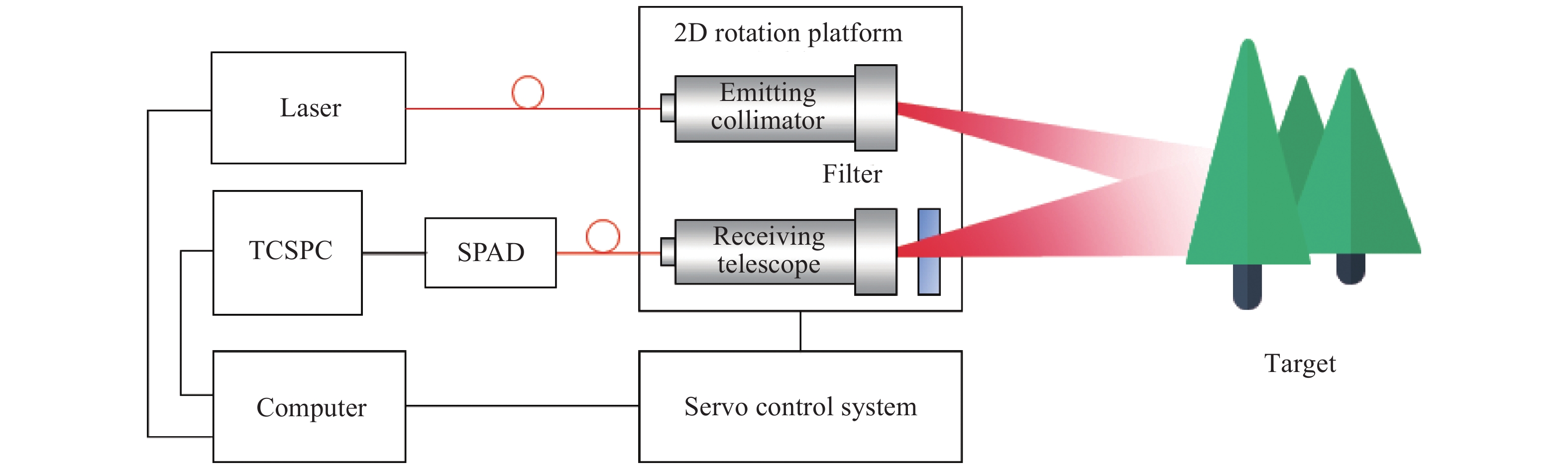
Fig. 1. Block diagram of photon-counting Lidar system
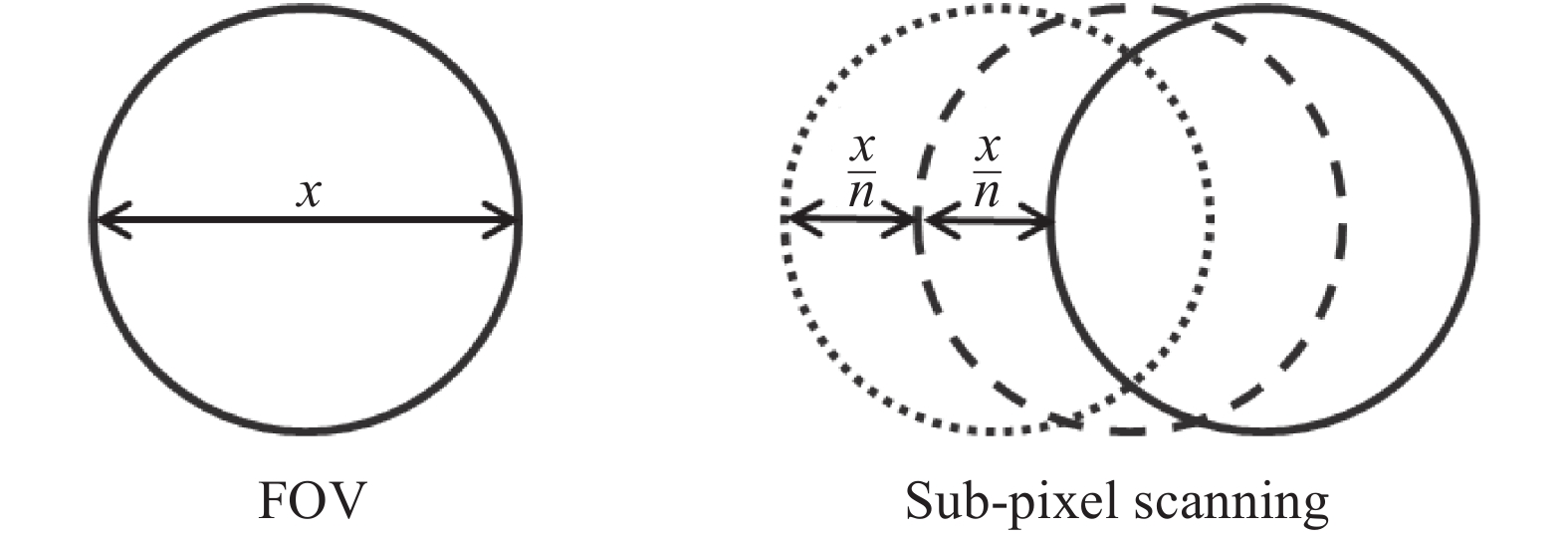
Fig. 2. Sub-pixel scanning method
Fig. 3. Beam reflection by a mirror
Fig. 4. Geometry distortion caused by a swing mirror
Fig. 5. Design of the rotation platform
Fig. 6. [in Chinese]
Fig. 6. Intensity image of the bottom of the poly. (a) Photo of the target taken by a visible-band camera; (b) Noise threshold b = 2.5 E y b
Fig. 7. Image reconstruction of the poly. (a) Intensity image; (b) Range image; (c) 3D point cloud reconstruction
Fig. 8. Photo of the target scene taken by a visible-band camera
Fig. 9. Multi-range image reconstruction results. (a) Intensity image E E L L
Fig. 10. 3D point cloud reconstruction. (a) Multi-range object reconstruction; (b) Enlarged image of the building 3.1 km away; (c) Enlarged image of the cables 1.1 km away
|
Table 1. Key parameters of the optical system


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20