
Yuan Huang, Feipeng Da, Lin Tang. Three-Dimensional Point Cloud Compression Algorithm Based on Improved Octree[J]. Acta Optica Sinica, 2017, 37(12): 1210003
- Acta Optica Sinica
- Vol. 37, Issue 12, 1210003 (2017)
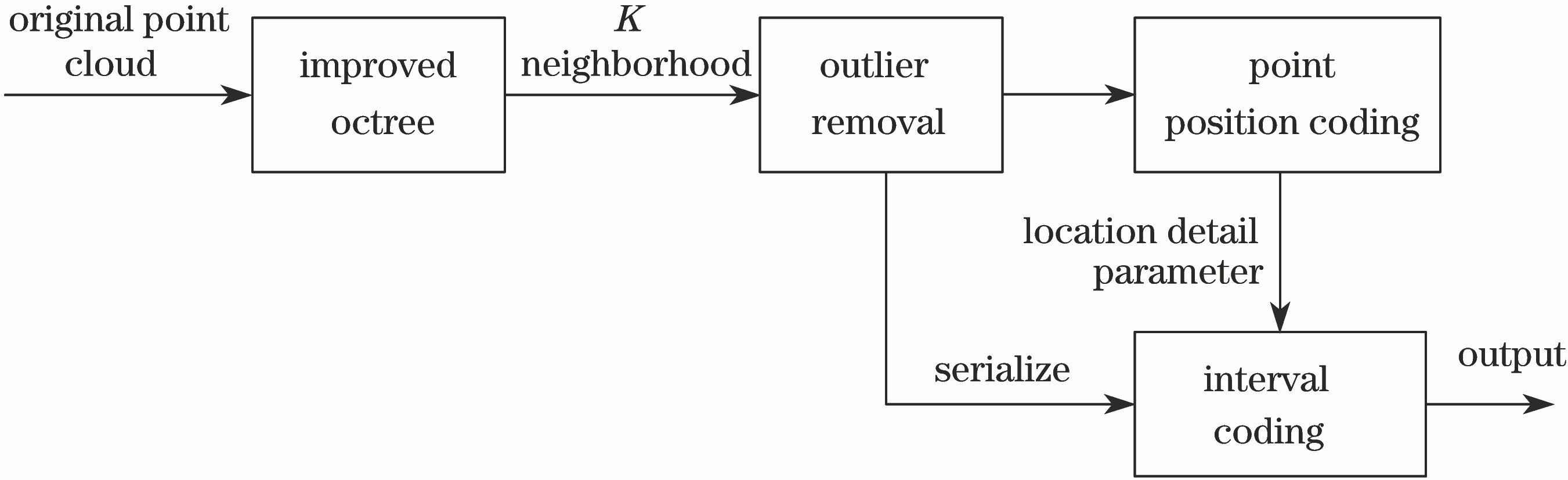
Fig. 1. Flowchart of the proposed algorithm
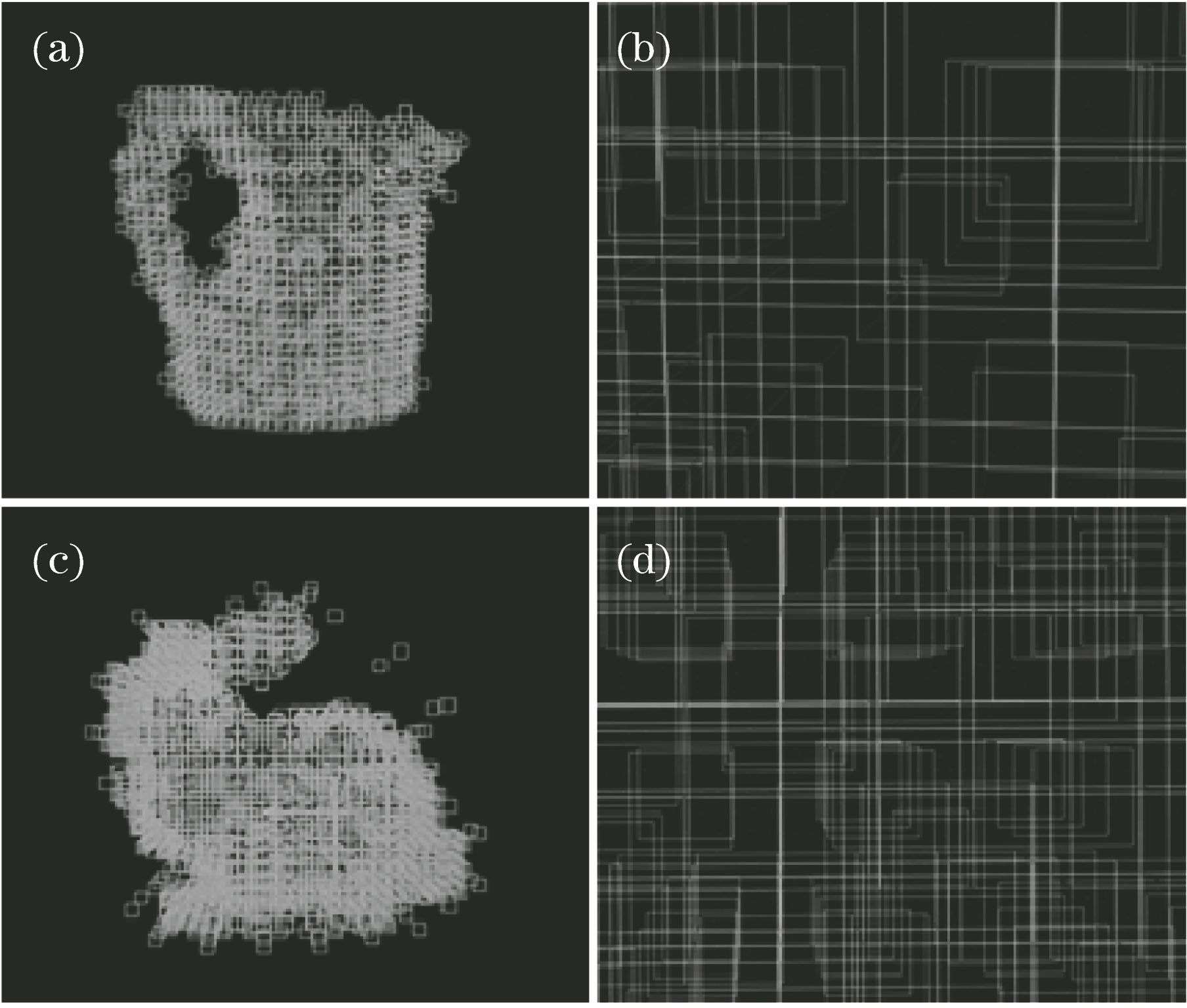
Fig. 2. Bounding box schematic and local enlargement details. (a) Bounding box schematic of kettle model; (b) local enlargement details of kettle model; (c) bounding box schematic of bunny model; (d) local enlargement details of bunny model
Fig. 3. Octree segmentation, each voxel containing at least one point. (a) n=1, Pvoxel=9; (b) n=2, Pvoxel=40; (c) n=3, Pvoxel=137; (d) n=4, Pvoxel=435; (e)n=5, Pvoxel=1426; (f) n=6, Pvoxel=4815; (g) n=7, Pvoxel=15845; (h) n=8, Pvoxel=45859
Fig. 4. Mask architecture of two layer octree
Fig. 5. Detail encoding of point position
Fig. 6. Point cloud models used in experiment. (a) Bunny model, point is 31607; (b) cat model, point is 10000; (c) kettle model, point is 19062; (d) face model, point is 46111; (e) plastic model, point is 24673
Fig. 7. Results of removing outliers. (a) Initial data; (b) point cloud data after removing outliers; (c) removed outliers
Fig. 8. Decompression schematic of bunny model. (a) Bunny model before decompression; (b) local amplification details of Fig. (a); (c) decompression result when t=0.25; (d) local amplification details of Fig. (c); (e) decompression result when t=0.005; (f) local amplification details of Fig. (e)
Fig. 9. Comparison of compression ratio and compression time
|
Table 1. Octree segmentation

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20