
Qing Yang, Li Zhang, Ran Li, Bichao Zhan, Lei Jia, Mengyang Liu. InSAR Terrain Matching Algorithm Based on Morphologically Enhanced HOG Features[J]. Laser & Optoelectronics Progress, 2022, 59(8): 0810001
- Laser & Optoelectronics Progress
- Vol. 59, Issue 8, 0810001 (2022)
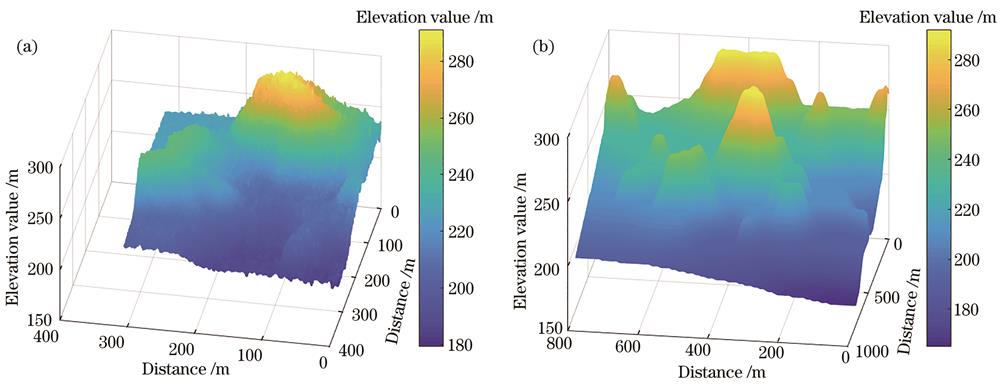
Fig. 1. 3D elevation maps. (a) REM; (b) DEM
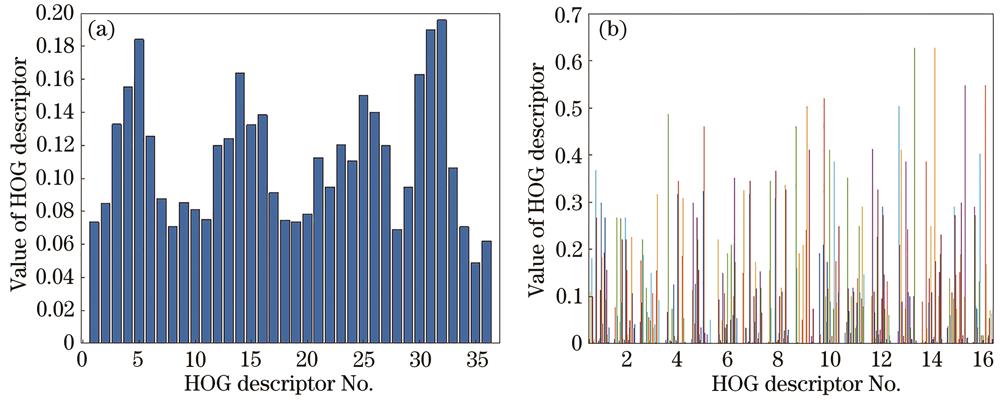
Fig. 2. HOG feature histograms. (a) REM; (b) DEM
Fig. 3. Diagram of expansion
Fig. 4. Diagram of corrosion
Fig. 5. Diagram of open operation effect
Fig. 6. Diagram of closed operation effect
Fig. 7. Two-dimensional elevation maps. (a) REM; (b) DEM; (c) image after closing operation
Fig. 8. Line graphs of three kinds of HOG eigenvalues
Fig. 9. Flowchart of proposed algorithm
Fig. 10. Match results. (a) Rough match; (b) smaller match; (c) fine match
Fig. 11. Polyline graphs of matching error for different noises. (a) Average matching error in x direction; (b) average matching error in z direction
|
Table 1. Experimental parameter setting
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Performance comparison of different algorithms
| ||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Matching results under different noise conditions

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20