
Xiaosong Shi, Yinglei Cheng, Zhongyang Zhao, Xianxiang Qin. Point Cloud Classification Algorithm Based on IPTD and SVM[J]. Laser & Optoelectronics Progress, 2019, 56(16): 161002
- Laser & Optoelectronics Progress
- Vol. 56, Issue 16, 161002 (2019)

Fig. 1. Original point cloud data sample
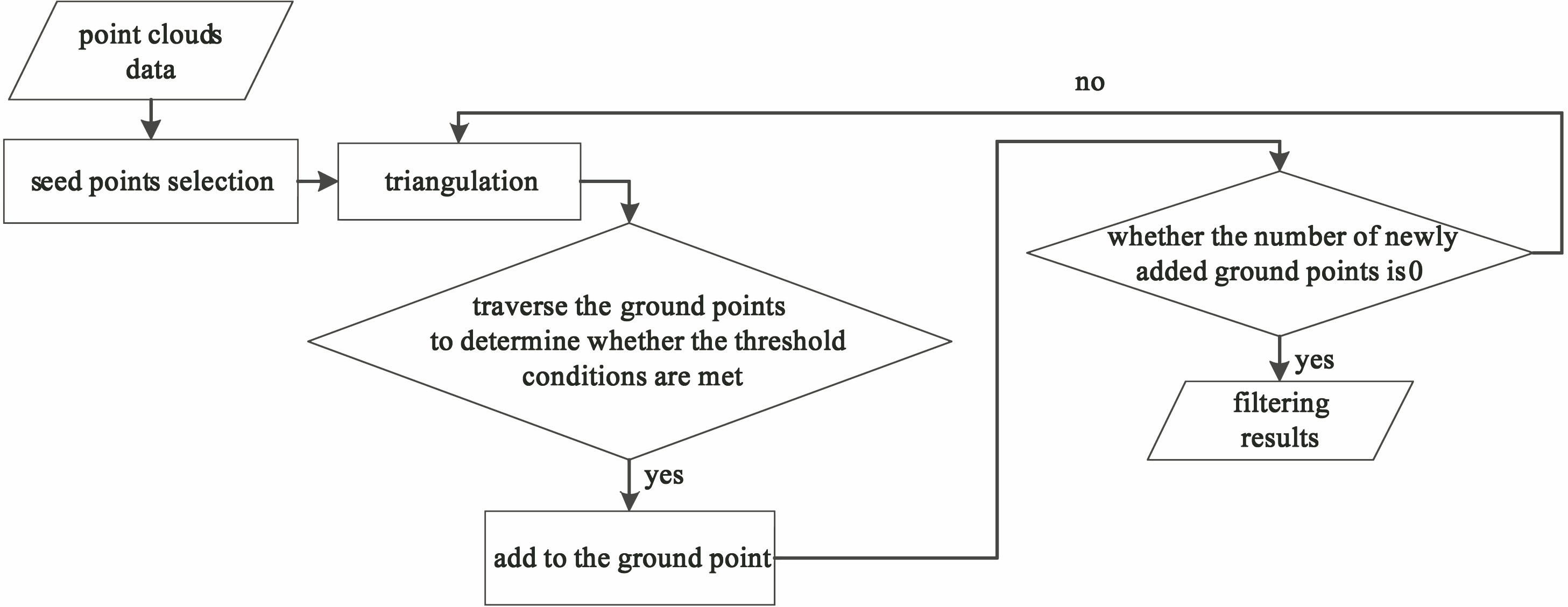
Fig. 2. Flow chart of IPTD filtering algorithm
Fig. 3. Diagram of points to TIN
Fig. 4. Flow chart of ground point classification algorithm
Fig. 5. Classification results of ground points. (a) Bungalow area; (b) building area
Fig. 6. Elevation distributions of point clouds. (a) Original point clouds; (b) normalized point clouds
Fig. 7. Assessment results of different features
Fig. 8. Comparison of boundary classification results. (a) Rough classification result of bungalow area; (b) rough classification result of building area;(c) fine classification result of bungalow area; (d) fine classification result of building area
Fig. 9. Classification results of different algorithms. (a) Artificial classification results; (b) classification results of traditional SVM; (c) classification results of NN-SVM; (d) classification results of proposed algorithm
| ||||||||||||||||||
Table 1. Classification accuracy of different feature combinations%
|
Table 2. Classification accuracy of boundary region%
| |||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Classification accuracy of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20