
Junhua Sun, Chang Liu, Zhou Zhang. General Distortion Correction Model of Omnidirectional Structured-Light Vision Measurement[J]. Acta Optica Sinica, 2019, 39(2): 0215003
- Acta Optica Sinica
- Vol. 39, Issue 2, 0215003 (2019)
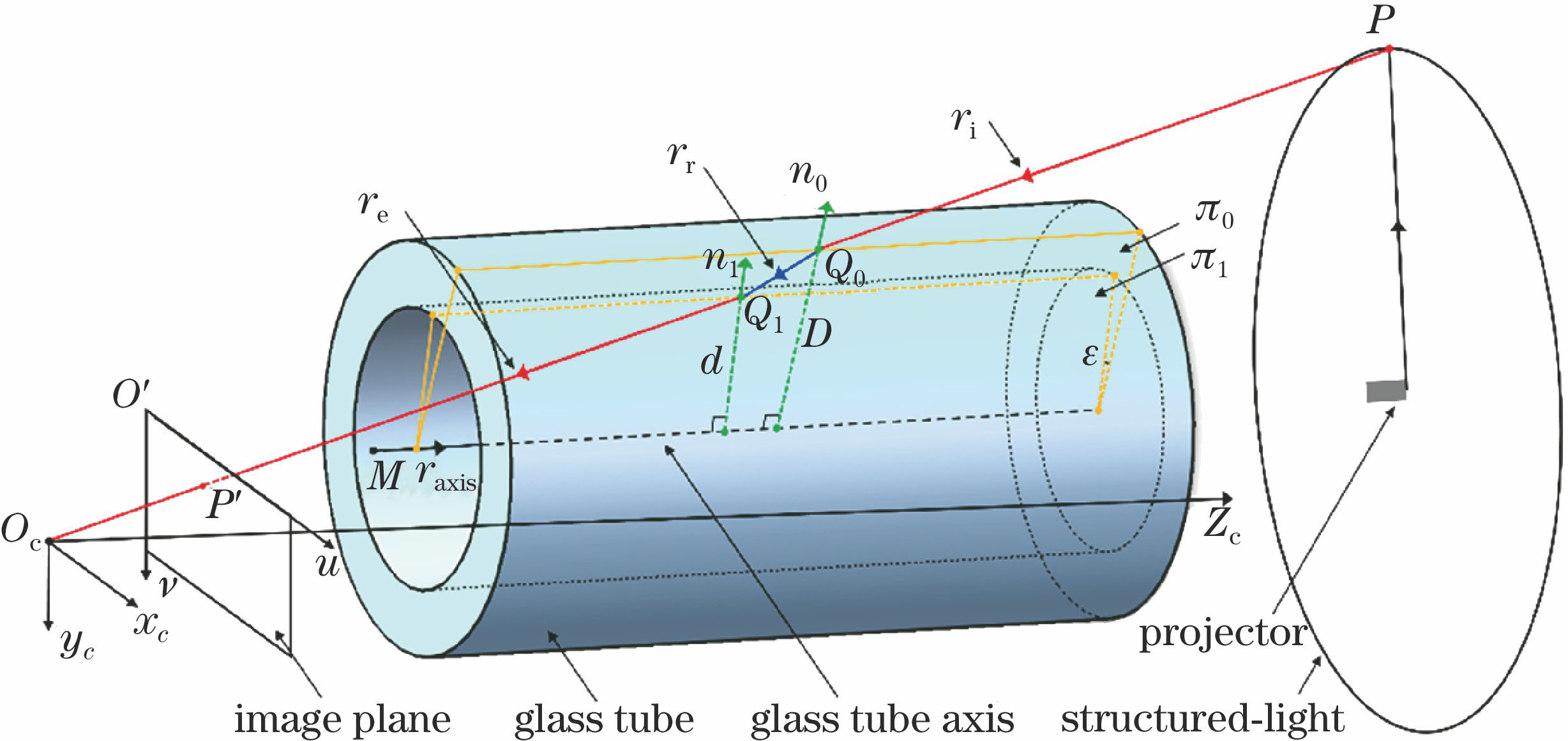
Fig. 1. Schematic of general distortion correction model of omnidirectional structured-light vision measurement
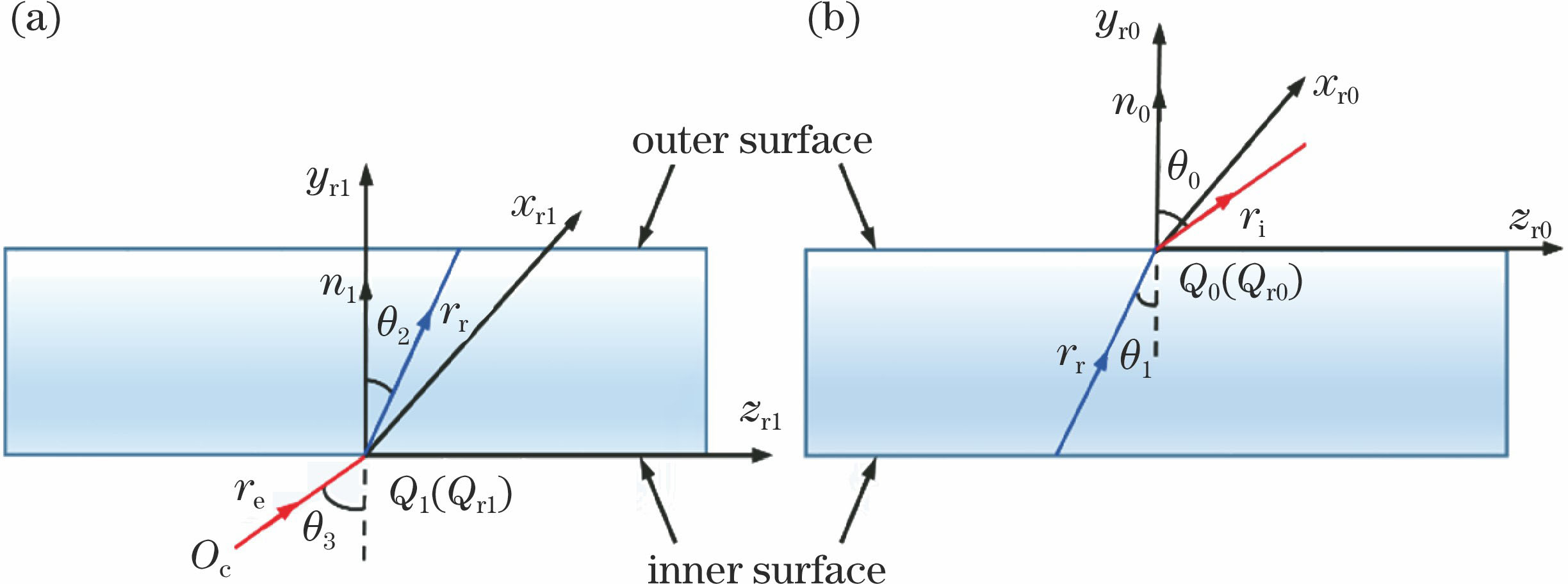
Fig. 2. Two non-coplanar refraction planes. (a) Refraction at Q1; (b) refraction at Q0
Fig. 3. Experimental devices. (a) Omnidirectional structural-light vision measurement system; (b) calibration devices
Fig. 4. Image of calibration board. (a) Captured by vision sensor camera; (b) captured by auxiliary one
Fig. 5. Measurement device for internal diameter of aluminum tube
Fig. 6. Light stripe points on image plane
Fig. 7. Light stripe points in 3D space
| |||||||||||||||
Table 1. Parameter calibration results of camera model
|
Table 2. Parameter calibration results of distortion correction mode
| ||||||||||||||||||||||||||||||||||||||||||||
Table 3. Results of repeatability measurementmm
| ||||||||||||||||||||||||||||||||||||||||||||
Table 4. Experimental measurement resultsmm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20