
De Zhang, Guozhang Li, Huaiguang Wang, Junning Zhang. Pose Estimation Algorithm Based on Combined Loss Function[J]. Laser & Optoelectronics Progress, 2019, 56(22): 221002
- Laser & Optoelectronics Progress
- Vol. 56, Issue 22, 221002 (2019)
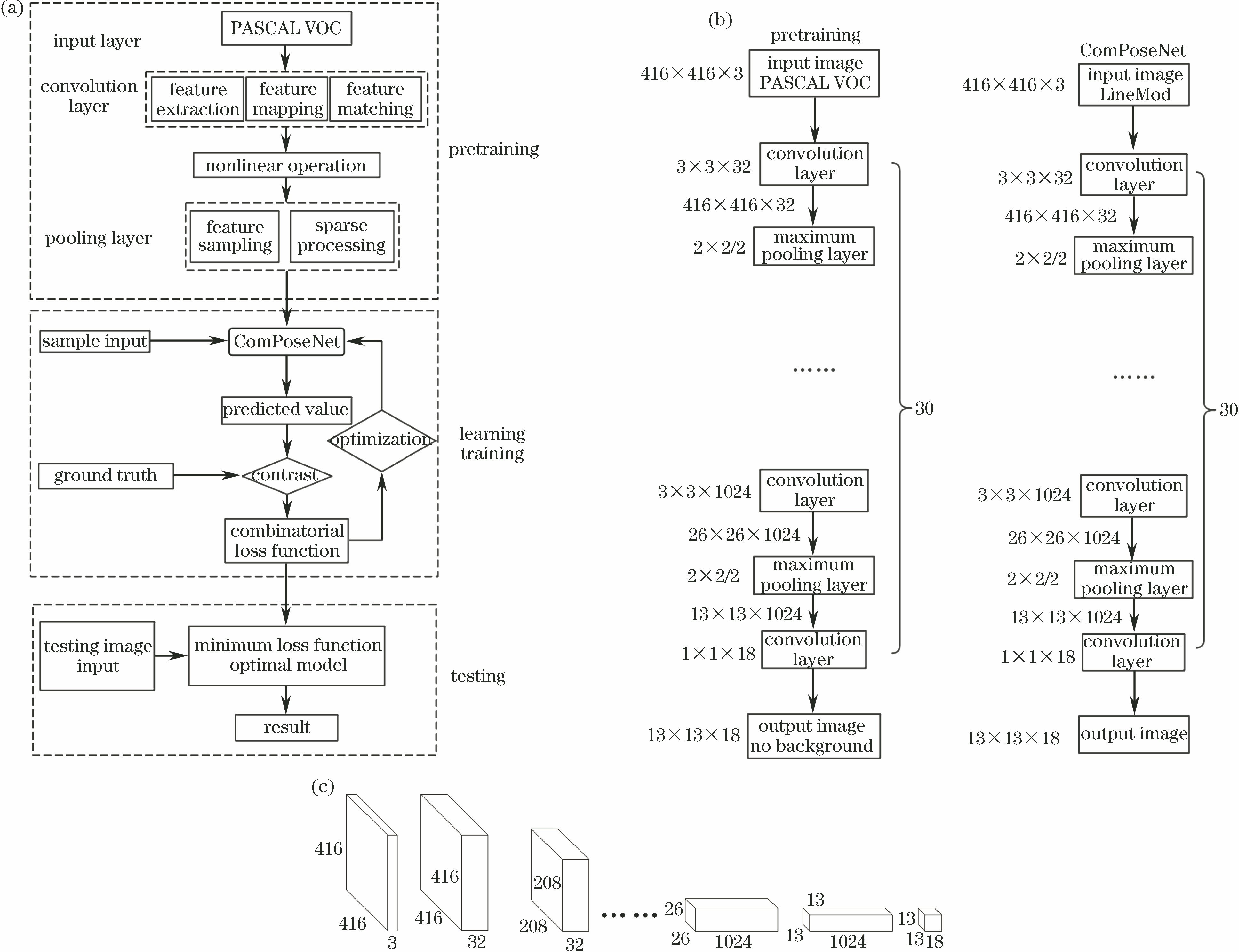
Fig. 1. ComPoseNet model. (a) ComPoseNet workflow; (b) preprocessing and ComPoseNet architecture; (c) image processing
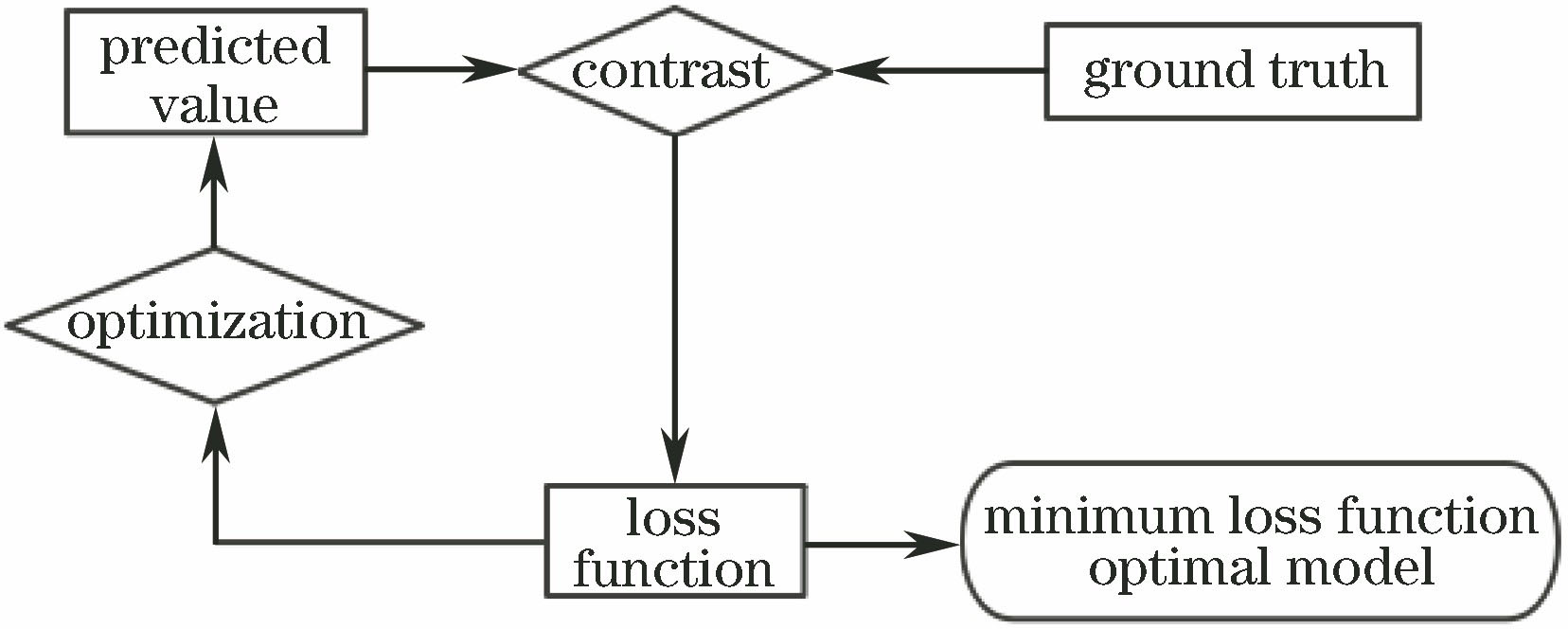
Fig. 2. Effect of loss function
Fig. 3. Geometric rule diagrams. (a) Selection rule schematic; (b) distance d; (c) angle θ; (d) angle α
Fig. 4. Effects of different loss functions. (a) Original image; (b) traditional method; (c) proposed algorithm; (d) comparison
Fig. 5. Translation errors of different algorithms
Fig. 6. Angle errors of different algorithms
Fig. 7. Effects of pose estimation of different algorithms
Fig. 8. Effects of different parameters on translation error
Fig. 9. Effects of different parameters on angle error
Fig. 10. Estimation effect diagrams of different parameter constraints. (a) Object; (b) d; (c) d+θ; (d) d+α; (e) d+θ+α; (f) comparison
Fig. 11. Target detection effects. (a) Telephone; (b) duck; (c) iron; (d) drill
|
Table 1. Errors and Accuracies of different loss functions
|
Table 2. Errors of different algorithms
|
Table 3. Errors under different parameters

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20