
Xinchun Li, Zhongting Zhao, Hongshi Yu. Channel State Information Indoor Fingerprint Localization Algorithm Based on Locally Linear Embedding and Gradient Boosting Decision Tree[J]. Laser & Optoelectronics Progress, 2022, 59(2): 0215008
- Laser & Optoelectronics Progress
- Vol. 59, Issue 2, 0215008 (2022)
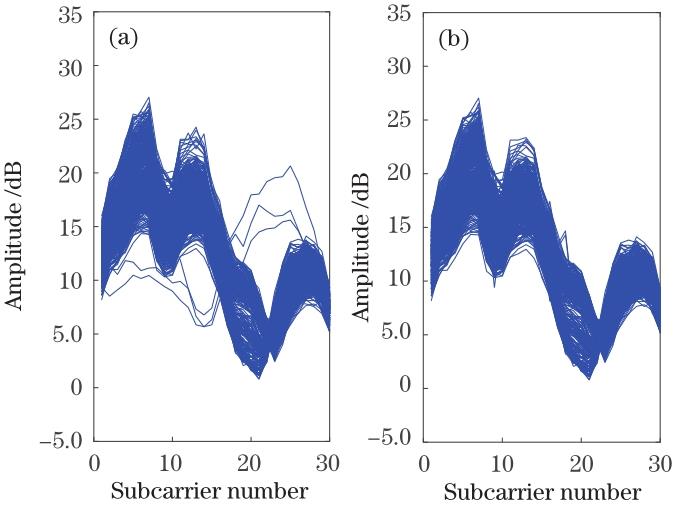
Fig. 1. Comparison before and after filtering. (a) Before filtering; (b) after filtering
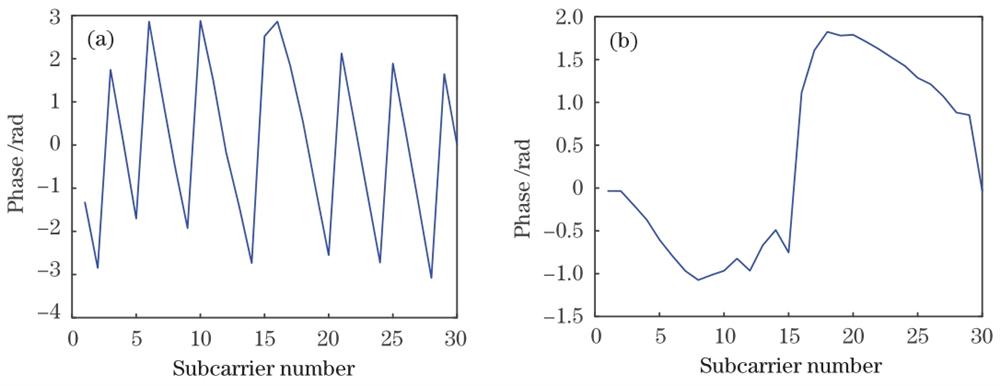
Fig. 2. Comparison before and after phase correction. (a) Before correction; (b) after correction
Fig. 3. Process of indoor positioning
Fig. 4. Schematic of GBDT
Fig. 5. Schematic diagram of fruit fly population foraging
Fig. 6. Flow chart of LLE+GBDT model
Fig. 7. Experimental environment. (a) East 302; (a) south 411
Fig. 8. Experimental scene diagrams for different sampling intervals
Fig. 9. CDF of different dimensionality reduction algorithms
Fig. 10. Positioning accuracy of different optimization algorithms
Fig. 11. Localization result CDF with missing values
| |||||||||||||||||||
Table 1. Comparison of positioning performances at different sampling intervals
|
Table 2. Localization performance of different dimensionality reduction algorithms
|
Table 3. Effect of missing values on positioning performance of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20