
Ruifeng Zhang, Ziyun Shu, Ganglei Nan. Calibration Method for Line-Structured Light[J]. Laser & Optoelectronics Progress, 2019, 56(22): 221101
- Laser & Optoelectronics Progress
- Vol. 56, Issue 22, 221101 (2019)
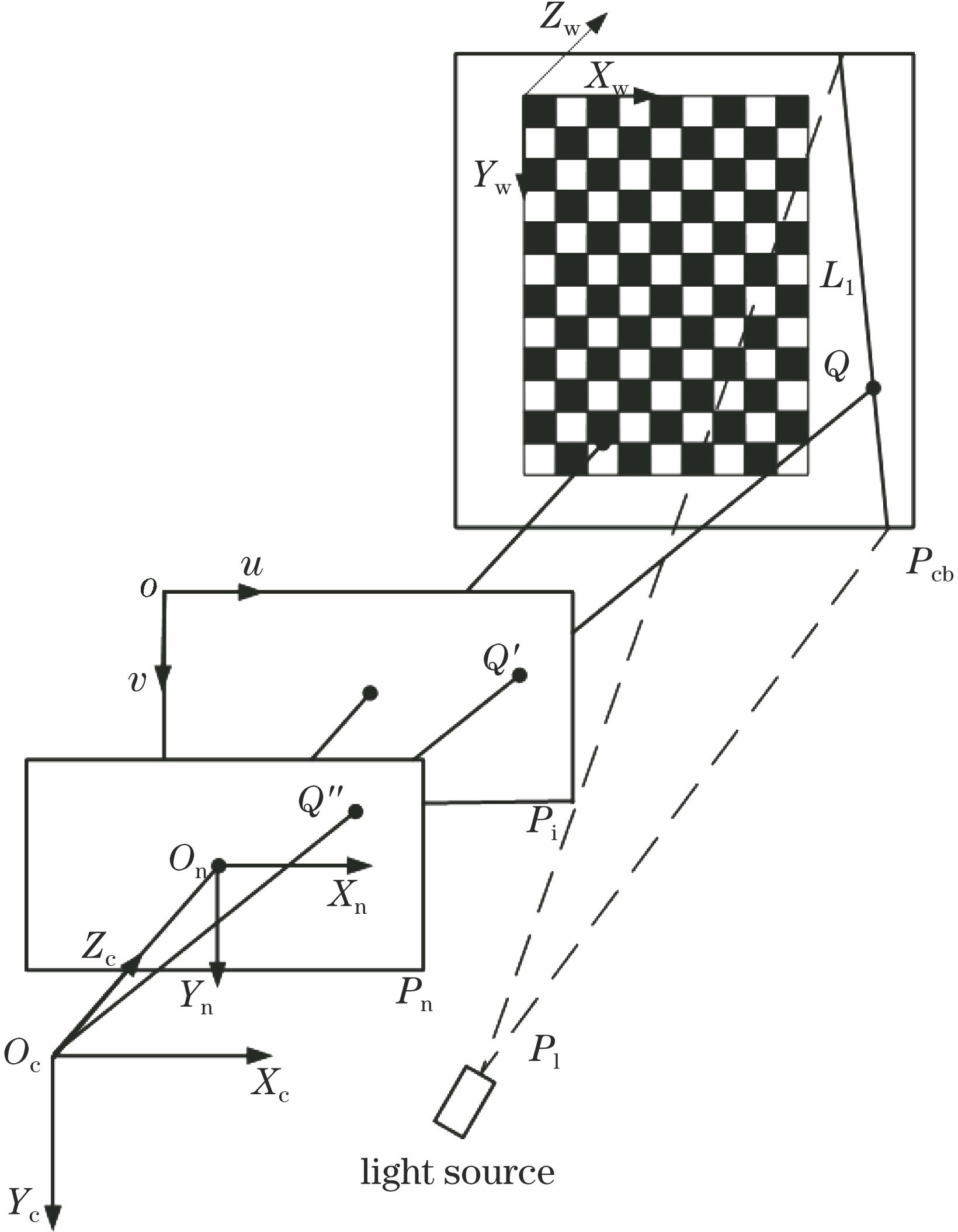
Fig. 1. Camera perspective projection model
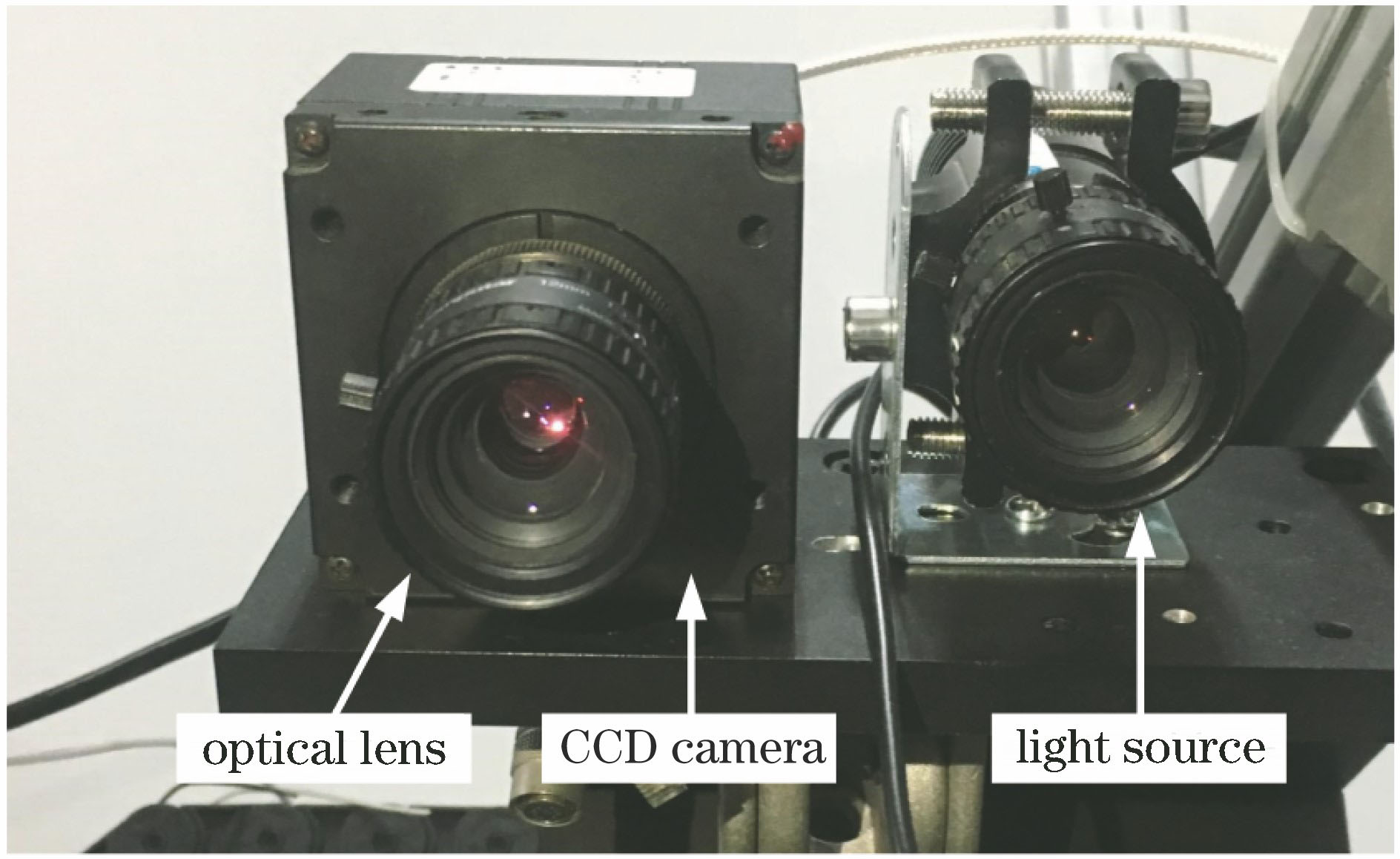
Fig. 2. Diagram of line-structured light sensor
Fig. 3. Flow chart of calibration for line-structured light
Fig. 4. Images taken by light plane calibration
Fig. 5. Picture of engine cylinder head
Fig. 6. Three-dimensional point clouds after encapsulation. (a) Top view; (b) front view
|
Table 1. Calibration results of two calibration methods
|
Table 2. Evaluation results of calibration results of two calibration methods
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Measurement results of cylinder head based on proposed method
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 4. Measurement results of cylinder head obtained by cross ratio invariance based calibration method

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20