
Zhenyu Li, Yuan Tian, Fangjie Chen, Jun Han. Aerial Image Stitching Algorithm for Unmanned Aerial Vehicles Based on Improved ORB and PROSAC[J]. Laser & Optoelectronics Progress, 2019, 56(23): 231003
- Laser & Optoelectronics Progress
- Vol. 56, Issue 23, 231003 (2019)
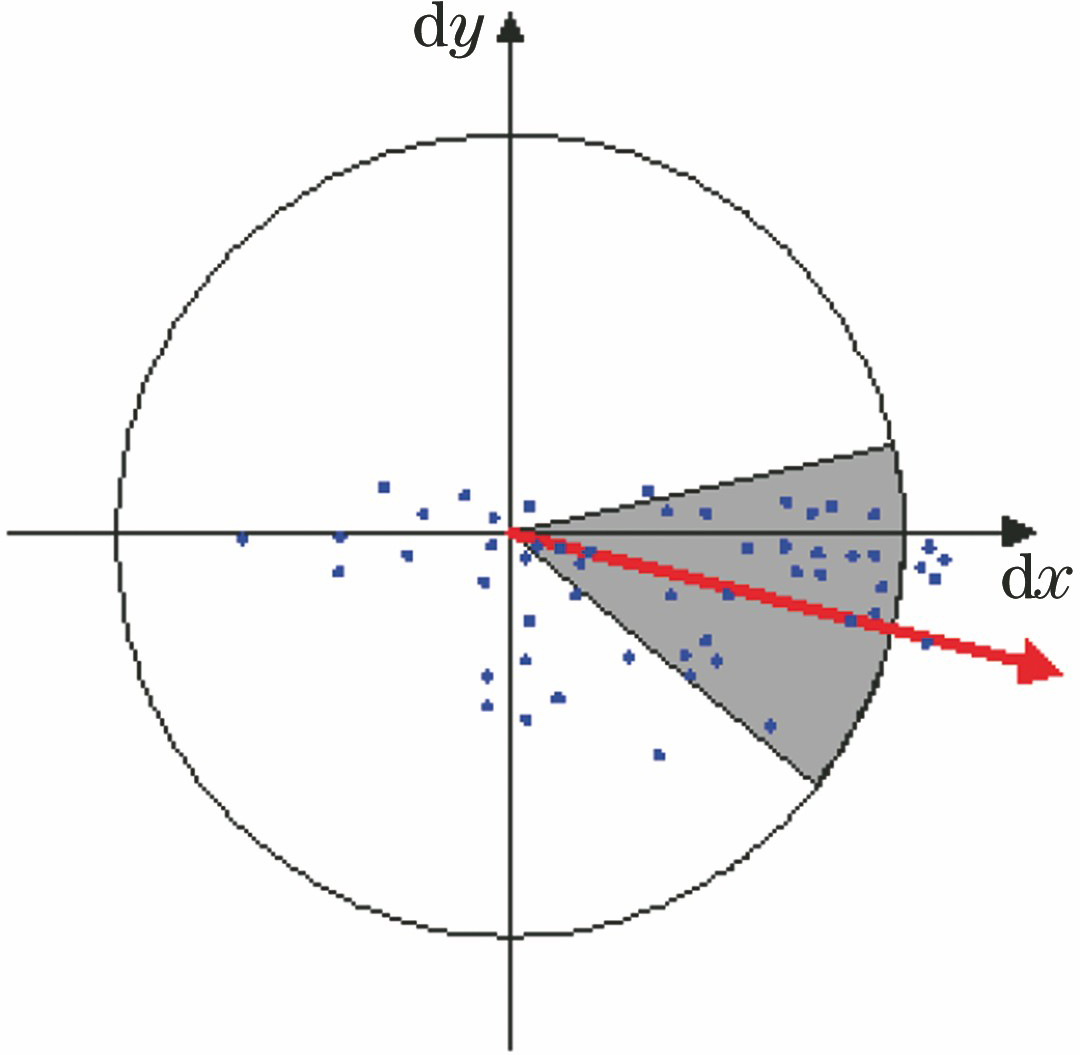
Fig. 1. Determination of feature point main direction
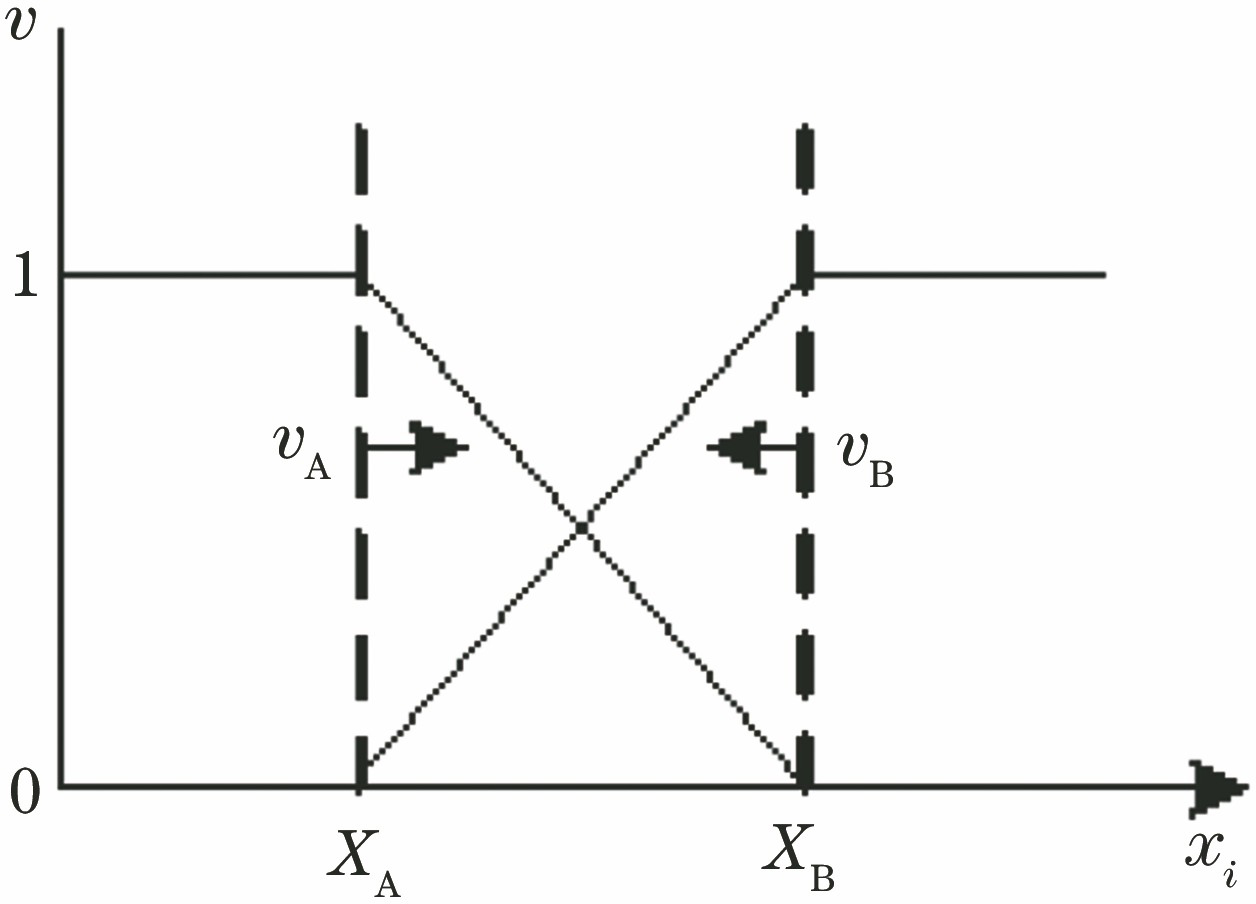
Fig. 2. Gradual-in and gradual-out image fusion method
Fig. 3. Oxford VGG dataset. (a) Bikes; (b) boat; (c) graffiti
Fig. 4. UAV aerial test images. (a) Test image 1 (b) test image 2; (c) test image 3
Fig. 5. Comparison of stitching results of three groups of test images. (a) Stitching image 1; (b) stitching image 2; (c) stitching image 3
| ||||||||||||||||||||
Table 1. Average time of each algorithm for feature point extraction
| ||||||||||||||||||||
Table 2. Matching accuracy of each algorithm
| ||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Matching time of each algorithm
| |||||||||||
Table 4. Root mean square error of each algorithm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20