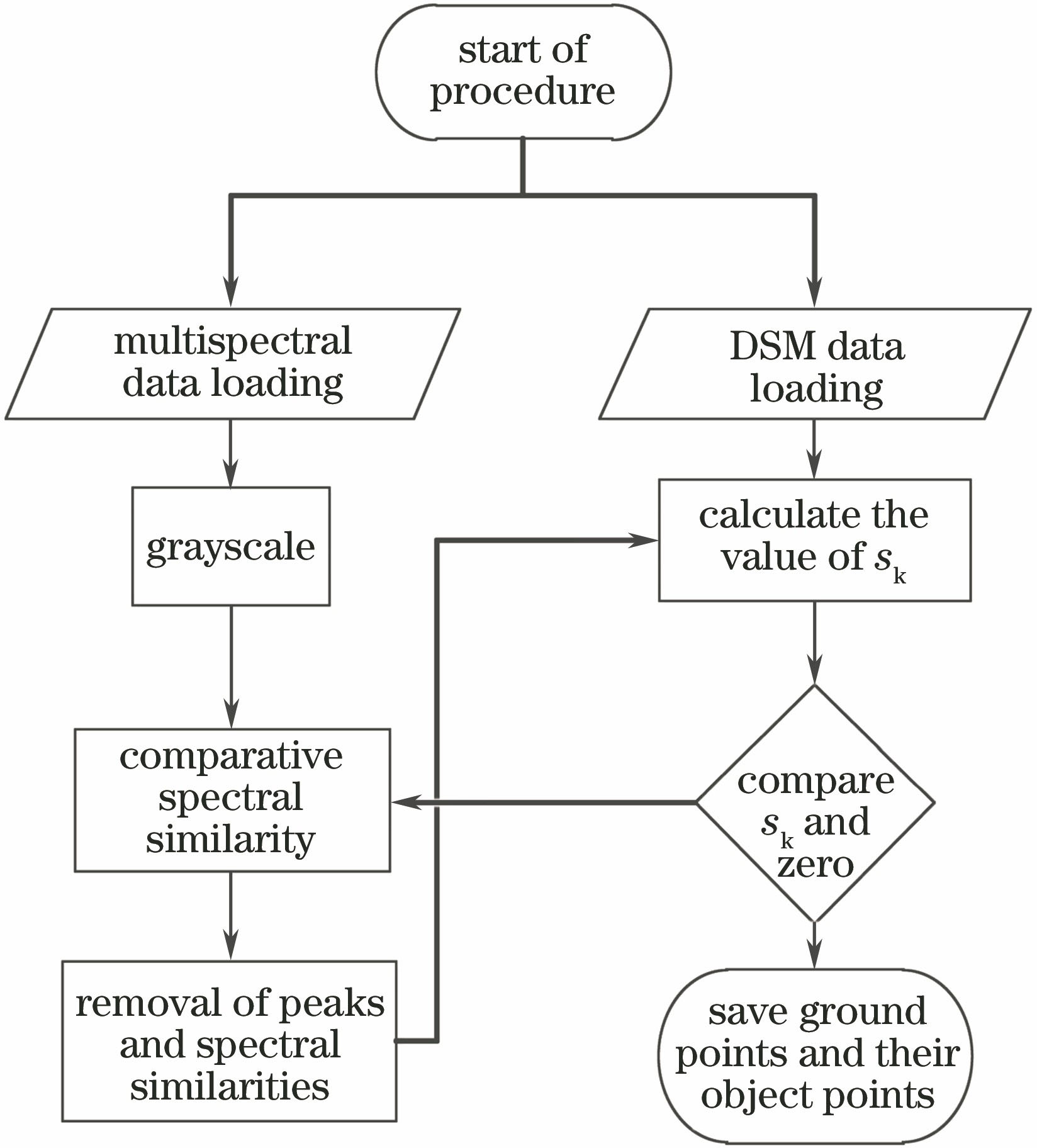
ing at the problem that the existing light detection and ranging (LiDAR) point cloud filtering method cannot effectively exclude the data hole interference in the digital surface model (DSM), a skewness balance point cloud filtering method based on multispectral data guidance is proposed. This method introduces the multispectral data into the point cloud filter as the guiding image to realize the fast denoising with the spectral similarity of the noise points. The experimental results show that this method can effectively eliminate the interference caused by the data hole to the point cloud filtering, and the obtained filtering error is reduced by 0.4%-0.8% compared with the original skewness point cloud filtering method. Compared with the popular filter algorithm based on support vector machines (SVM), the error of this method is reduced by 0.1%-0.4%.

Xiaofeng Han, Fengbao Yang, Hong Wei, Dawei Li, Dan Liu. Point Cloud Filter of Skewness Balance Based on the Guidance of Multispectral Data[J]. Laser & Optoelectronics Progress, 2018, 55(4): 042801
