
Yizhen Zhu, Shunyao Li, Shuangmu Zhuo, Lan Yang. Designing Optical Systems for Close-Distance Vehicle Lenses in Target Recognition[J]. Laser & Optoelectronics Progress, 2022, 59(17): 1722001
- Laser & Optoelectronics Progress
- Vol. 59, Issue 17, 1722001 (2022)
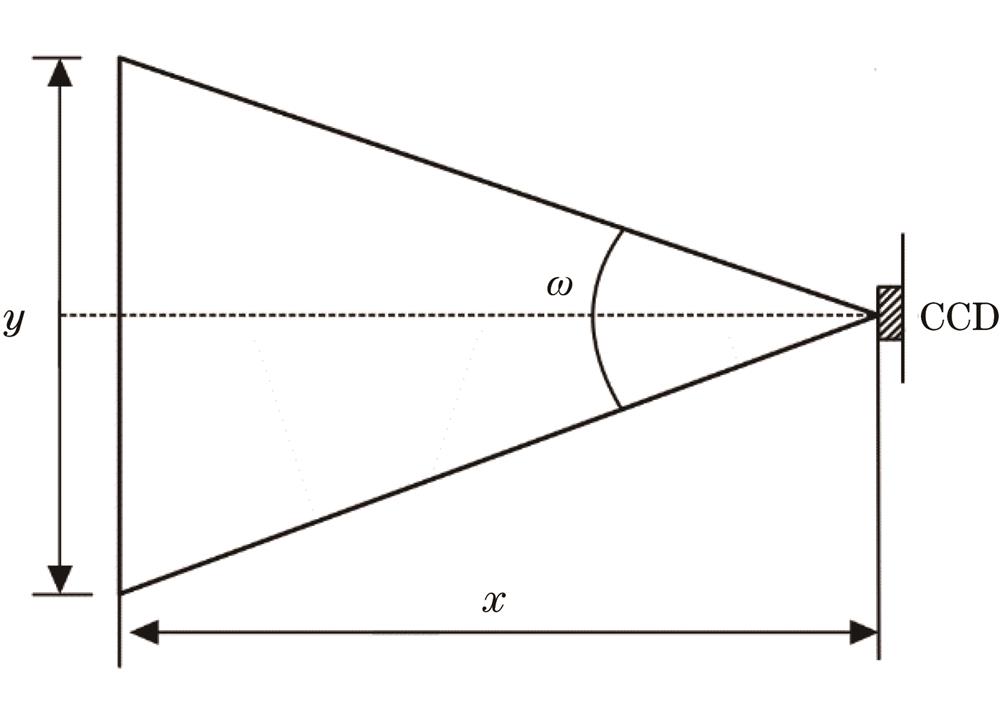
Fig. 1. Schematic of horizontal field angle of lens
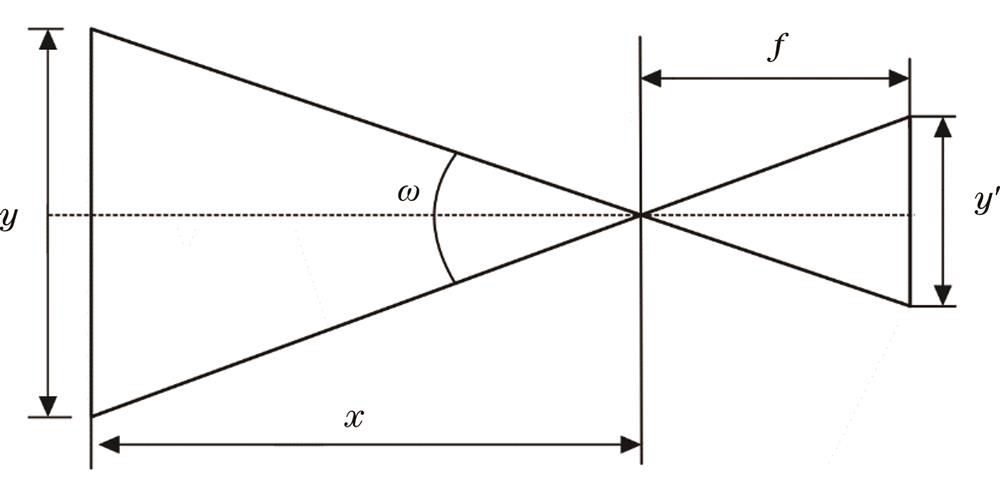
Fig. 2. Schematic of focal length calculation
Fig. 3. Schematic of depth of field
Fig. 4. Initiating structure figure
Fig. 5. Three-dimensional view of Tessar structure
Fig. 6. Field curvature and distortion curves before and after optimization. (a) Before optimization; (b) after optimization
Fig. 7. Comparison of spot diagram before and after optimization. (a) Before optimization; (b) after optimization
Fig. 8. Diagram of MTF curve
|
Table 1. Design indexes of Tessar vehicle lens
|
Table 2. Initiating structure parameter
|
Table 3. Lens structure parameters after optimization
|
Table 4. Results of the most sensitive tolerance analysis unit: mm
|
Table 5. Allowable tolerances for parts
|
Table 6. Results of Monte Carlo tolerance analysis

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20