
Yongfeng Zhang, Hao Xian. Piston sensing via a dispersed fringe sensor with a merit-function-based active scanning algorithm at low light levels[J]. Chinese Optics Letters, 2019, 17(12): 121101
- Chinese Optics Letters
- Vol. 17, Issue 12, 121101 (2019)
Abstract
It has been a trend that a segmented mirror is employed to construct extremely large telescopes. Up to this date, several large segmented telescopes have been completed, such as the Keck I/II[
Over the past decades, many effective methods have been proposed and demonstrated in indoor and on-sky experiments. The broadband/narrow-band algorithm[
Due to the inherent feature of spatially dispersing the broadband light over a broad range, with limited photons passing through the sub-aperture, the photon events in each pixel would be less and less, which makes DFS extremely vulnerable to noise contamination. The information available would be lost in the noisy background, which is more serious for low light level cases. Traditional algorithms for extraction of piston error from a dispersed fringe pattern (DFP), such as the least-squared fitting (LSF) method[
Sign up for Chinese Optics Letters TOC. Get the latest issue of Chinese Optics Letters delivered right to you!Sign up now
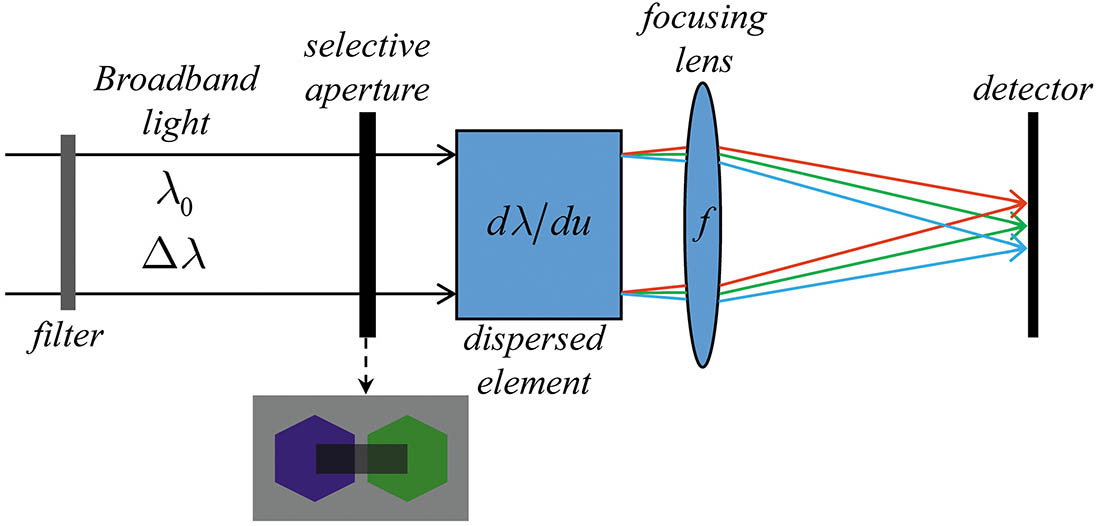
A geometry of DFS is shown in Fig.
![]()
Figure 1.Geometry of DFS.
When DFS is incident with the broadband light, with central wavelength
In order to obtain a further understanding of the unfavorable effect of dispersion, the quantity
| 2 | 7 | 3 | 100 | 100/1.236 | 750 | 100 |
Table 1. Parameters Used for Analysis of J as a Function of Piston Error
![]()
Figure 2.Relation between
Obviously, the quantity
Li et al. proposed the DFA-LSR algorithm to cope with the fine co-phasing problem in strong noise. However, it depends on the reliable left and right peak values after accumulation along the dispersion direction. When the absolute value of piston error is larger than one quarter of the minimum wavelength, the characteristic peaks would disappear, thus, this algorithm becomes invalid. In order to make up for this technical vacancy, a merit-function-based active scanning algorithm is introduced. It makes full use of the actuators attached to the back of the segment to actively actuate one of the segments in question. Figure
![]()
Figure 3.Flow chart of the algorithm introduced in this Letter.
There are many merit function definitions available[
![]()
Figure 4.
It could be seen that the maximum is reached when the piston error is zero, not only for a uniform spectrum, but also for a random spectrum. It is indicated that the merit function defined as Eq. (
As an example for describing the algorithm developed here, we assume here that the segments are actively actuated by three actuators in the piston, each of which is within a range of 100 μm, and a resolution of 0.5 nm, and the segment could deviate from the ideal position in the
![]()
Figure 5.Signal for a piston error of 42 μm. When the displacement of the actuator is −42 μm, the normalized merit function reaches its maximum.
The displacement corresponding to the maximum of the normalized merit function is eventually equal to the negative of the ideal piston error. The approach proposed in this Letter is simple to implement, and in general, the piston error could be effectively and accurately sensed provided that the value of error is within the range of the actuator; thus, it is free of the special requirements in the traditional methods, such as the optimal fringe extraction line[
![]()
Figure 6.Two realizations of noisy DFP for different SNRs: (a) SNR is 1, (b) SNR is 5.
Essentially, the problem of how the noises with different levels affect the piston sensing is equivalent to whether or not the value of the merit function evaluated from noisy DFP reaches its maximum when the piston error is zero. An instant realization of noisy DFP for an SNR of 1 is simulated, and immediately the resulting merit function is calculated for different power exponents and shown in Fig.
![]()
Figure 7.Relative merit function versus piston error for an instant realization of DFP for an SNR of 1.
The conclusion could be drawn that the larger the power exponent is, the larger the dynamic range of merit function for noisy DFP is; as a consequence, the larger the SNR of the relative merit function is, and the more accurate the piston sensing is.
We have also analyzed the piston corresponding to the maximum of the merit function for a series of SNRs for different power exponents and for either a uniform spectral profile or a random spectral profile shown in Fig.
![]()
Figure 8.Piston corresponding to the maximum of merit function versus different SNRs: (a) for uniform spectral profile, (b) for random spectral profile as in Fig.
Here, for each given power exponent and SNR, five realizations for noisy DFP are generated. It is clear that for larger SNR the piston value corresponding to the maximum of the merit function is closer to the zero piston; that is to say, the sensing error is smaller. For a larger power exponent, the deviation of the piston value corresponding to the maximum of the merit function from the zero piston is larger. Even for an SNR of 0.5, the deviation is up to −70 μm when the power exponent is 2, which is unacceptable. The analysis here suggests that when extracting the piston error from the strongly contaminated DFP, the best choice is to use the large power exponent in order to increase the possibility of accurately sensing the piston step. The conclusion is applicable for the uniform and random spectral profiles.
In conclusion, a substantial amount of the Monte Carlo experiments proximate to the realism demonstrate that the piston misalignment of the segmented mirror could be sensed via the dispersed fringe sensor with a merit-function-based active scanning algorithm, especially for cases at low light level. A power-based merit function is employed, and via the active scanning in the piston, the original piston error could be effectively obtained according to the maximum of the merit function. In practice, the larger power exponent is used to resist the negative effect of strong noise. This innovative approach overcomes the relatively demanding requirements in traditional DFS extraction methods and broadens the application field to strong noise and weak-light-level cases. The combination of methods proposed here and DFA-LSR could finely co-phase the segmented mirror within the optical tolerance limit reliably. In general, the capture range is only limited by the available range of actuators in active optical systems, which makes it feasible in sensing the large-scale piston error beyond the capture range of a traditional DFS. A specialized experiential bench is being built for the scheduled experimental demonstration, and the experimental results will be reported in a future publication.
References
[1] G. A. Chanan, J. E. Nelson, T. S. Mast. Proc. SPIE, 628, 466(1986).
[2] J. H. Burge, L. B. Kot, H. M. Martin, R. Zehnder, C. Zhao. Proc. SPIE, 6273, 62730M(2015).
[3] B. Stobie, K. Meiring, D. Buckley. Proc. SPIE, 4003, 355(2000).
[4] R. K. Jungquist. Proc. SPIE, 3779, 2(1999).
[5] X. Q. Cui. Proc. SPIE, 6267, 626703(2006).
[6] J. Nelson, G. H. Sanders. Proc. SPIE, 7012, 70121A(2008).
[7] R. Gilmozzi, J. Spyromilio. Proc. SPIE, 7012, 701219(2008).
[8] M. J. Eisenhower, L. M. Cohen, L. D. Feinberg, G. W. Matthews, J. A. Nissen, S. C. Park, H. L. Peabody. Proc. SPIE, 9602, 96020A(2015).
[9] G. Chanan, M. Troy. Appl. Opt., 38, 6642(1999).
[11] G. Chanan, C. Ohara, M. Troy. Appl. Opt., 39, 4706(2000).
[14] S. S. Wang, Q. D. Zhu, W. R. Zhao, L. Li, G. R. Cao. Chin. Opt. Lett., 7, 1007(2009).
[16] D. Yue, S. Y. Xu, H. T. Nie. Appl. Opt., 54, 7917(2015).
[18] F. Shi, G. Chanan, C. Ohara, M. Troy, D. C. Redding. Appl. Opt., 43, 4474(2004).
[19] M. A. van Dam, B. A. Mcleod, A. H. Bouchez. Appl. Opt., 55, 539(2016).
[20] W. R. Zhao, G. R. Cao. Opt. Express, 19, 8670(2011).
[21] Y. Li, S. Q. Wang, C. H. Rao. Appl. Opt., 56, 4267(2017).
[22] R. A. Muller, A. Buffington. J. Opt. Soc. Am. A, 64, 1200(1974).
[23] M. Li, X. Liu, A. Zhang, H. Xian. Chin. Opt. Lett., 17, 061101(2019).
[25] M. Li, X. Y. Li, W. H. Jiang. Opt. Express, 16, 8190(2008).

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20