
Zhenqi Liang, Jingshi Wang, Gang Xiao, Liu Zeng. FAANet: feature-aligned attention network for real-time multiple object tracking in UAV videos[J]. Chinese Optics Letters, 2022, 20(8): 081101
- Chinese Optics Letters
- Vol. 20, Issue 8, 081101 (2022)
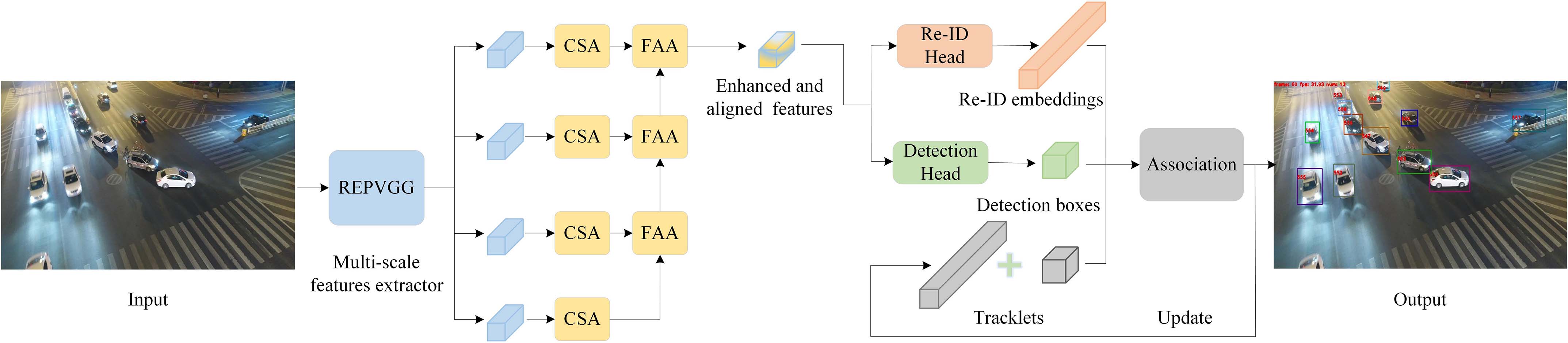
Fig. 1. Architecture of our tracker FAANet tracking framework. This framework contains four components: backbone (RepVGG), neck (CSA + FAA), head (Re-ID + detection), and association.
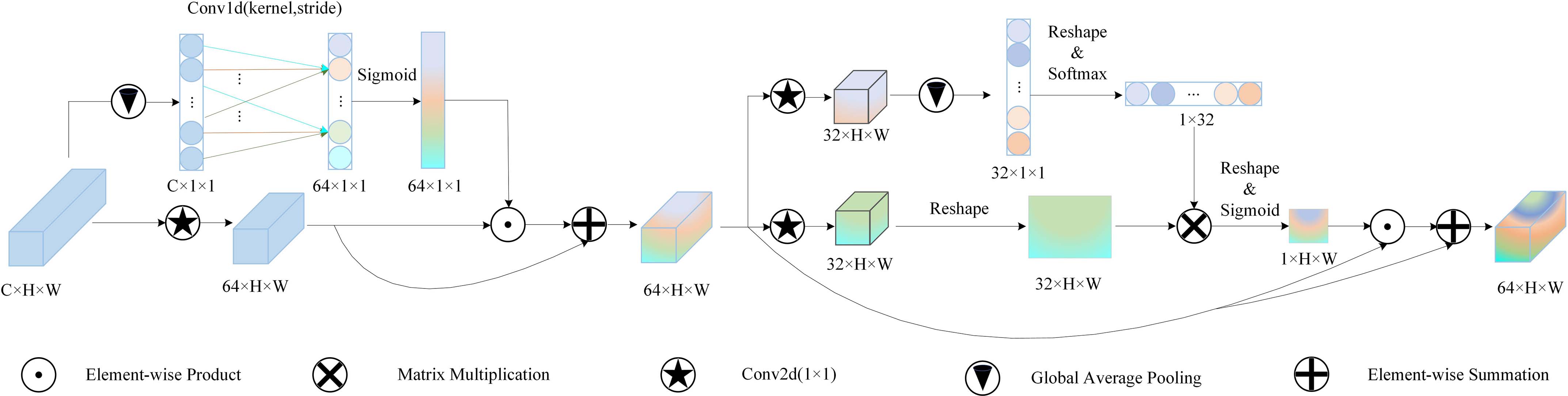
Fig. 2. Architecture of CSA module.
Fig. 3. Architecture of FAA module.
Fig. 4. Procedure of association between detections and tracklets.
Fig. 5. Structural re-parameterization of a RepVGG block.
Fig. 6. MOTA-IDF1-FPS comparison with other UAV-based MOT trackers on the UAVDT test dataset. The horizontal axis is FPS, the vertical axis is MOTA, and the radius of the circle is IDF1.
Fig. 7. IDF1 comparison with other UAV-based MOT trackers on the UAVDT test dataset based on scene attributes. The IDF1 of FAANet is marked outside the circle.
Fig. 8. Examples and comparison of tracking results between DeepSORT and FAANet on the UAVDT test dataset.
|
Table 1. Results of a Quantitative Comparison among Classic MOT Methods and Recent UAV-Based Methods on the UAVDT Test Dataseta
|
Table 2. Evaluation of the Critical Factors in FAANeta
|
Table 3. The Improvement of Re-parameterization Technique

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20