
Lu Fu, Yanguo Fan, Guosheng Li, Dingfeng Yu, Jianglong Chai. Grid Motion Statistics Fast Matching Algorithm for Rotating Images[J]. Laser & Optoelectronics Progress, 2021, 58(12): 1210005
- Laser & Optoelectronics Progress
- Vol. 58, Issue 12, 1210005 (2021)
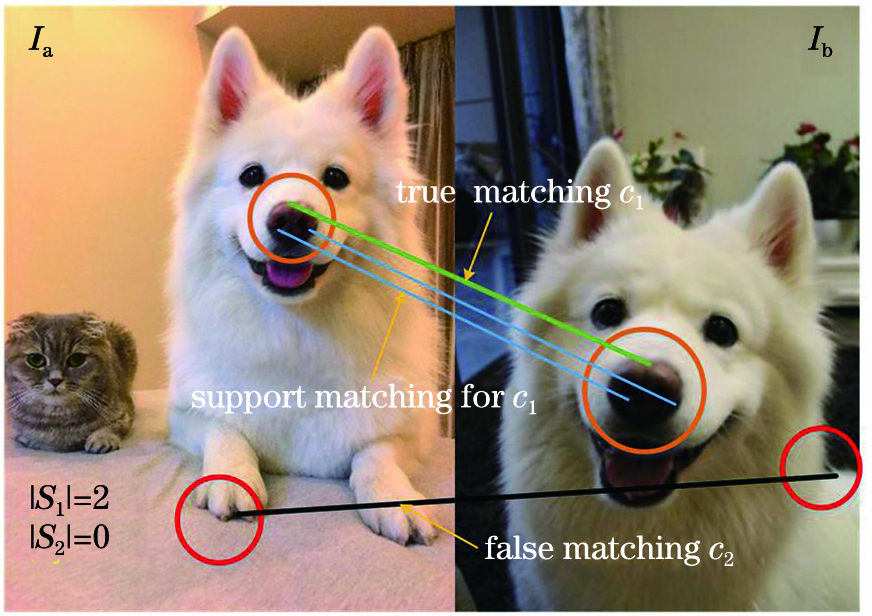
Fig. 1. Matching process of motion statistical model
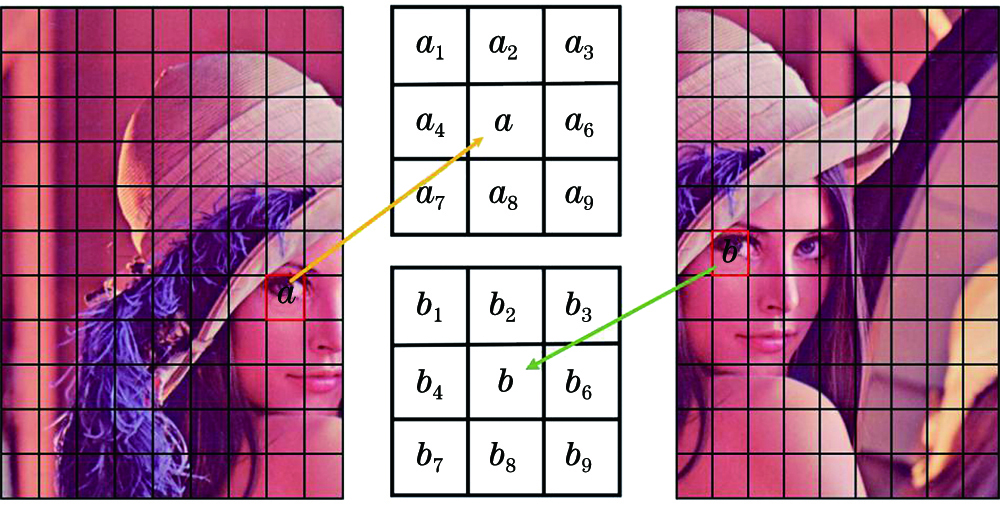
Fig. 2. Mesh frame and motion kernel model
Fig. 3. Rotating motion kernels
Fig. 4. Experimental images of rotation angle calculation. (a) Reference image; (b) 72°; (c) 144°; (d) 216°; (e) 288°
Fig. 5. Main direction angle change distribution before and after mismatch elimination. (a) Before mismatch elimination; (b) after mismatch elimination
Fig. 6. Three groups of boat images from different angles. (a) Image 1;(b) image 2;(c) image 3
Fig. 7. Actual images taken. (a) Image 4; (b) image 5; (c) image 6
Fig. 8. Comparison of feature matching results. (a) Image 1; (b) image 2; (c) image 3; (d) image 4; (e) image 5; (f) image 6
|
Table 1. Rotation angles corresponding to optimal shape of motion kernels
|
Table 2. Statistical results of main direction angle
|
Table 3. Number of matches for different algorithms
| |||||||||||||||||||||||||||||||||||||||||
Table 4. Comparison of matching time of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20