
Liang Hu, Huixian Duan, Haodong Pei, Dianqi Sun, An Shu. Binocular Vision Position and Attitude Measurement for Key Features of Non-Cooperative Spacecraft[J]. Chinese Journal of Lasers, 2022, 49(17): 1704003
- Chinese Journal of Lasers
- Vol. 49, Issue 17, 1704003 (2022)
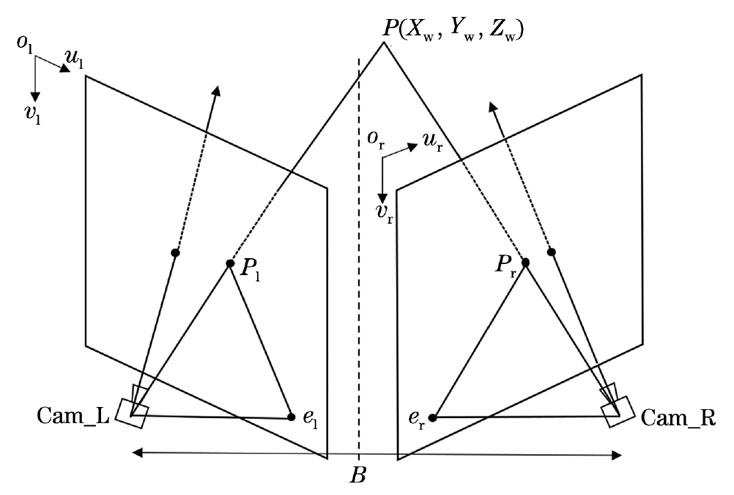
Fig. 1. Converging binocular stereo vision measurement model

Fig. 2. Result images of the candidate ellipse of arc segment combination. (a) Arc-support segment method; (b) improved method
Fig. 3. Result image of the outer docking ring of non-cooperative target
Fig. 4. Result images of heat shield reticles detection. (a) Proposed method; (b) Hough transform
Fig. 5. Schematic diagram of the coordinate system. (a) Measurement coordinate system and camera coordinate system; (b) target coordinate system
Fig. 6. Schematic diagram of position and attitude measurement process
Fig. 7. Absolute and relative position and attitude during the approach. (a) Absolute position; (b) absolute angle; (c) relative position; (d) relative angle
|
Table 1. Analysis of the results of two ellipse detection methods
|
Table 2. Position and attitude measurement results when the satellite model rotates around the X axis
|
Table 3. Position and attitude measurement results when the satellite model rotates around the Z axis
|
Table 4. Position and attitude measurement results when the satellite model rotates around the Y axis

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20